04.04.2013
<font> Речь пойдет именно про настройку работы двигателя на ХХ, что является весьма актуальным для моторов отличных от стандартных. Метод вполне работоспособный, как выяснилось и на неисправных двигателях, на которых удается добиться вменяемого ХХ даже при серьезных неисправностях в ЦПГ для любых существующих прошивок, в которых есть РХХ.</font>
<font>Для начала несколько слов о самом процессе регулирования ХХ в контроллере. Существуют ДВА регулятора холостого хода в стандартных и приближенных к ним прошивках. Оба регулятора начинают работать когда обороты опускаются ниже оборотов Первого переходного режима, когда выбрасывается флаг ХХ.</font>
<font>Работа П-Регулятора</font>
<font> Первый это П-регулятор, который управляет углом зажигания и предназначен для тонкого регулирования, те регулирования при малых отклонениях оборотов. Если разница оборотов заданных и текущих превышает величину Зона нечувствительности то происходит изменение угла зажигания на ХХ:</font>
<font>UOZ = UOZXX + KUOZ * EFREQ, где:</font>
<font>UOZXX — УОЗ на ХХ минус Коррекция УОЗ на ХХ</font>
<font>EFREQ — Текущая ошибка оборотов при регулировании.</font>
<font>MINEFR — Зона нечувствительности.</font>
<font>KUOZ — Коэффициент коррекции УОЗ, принимается равным Пропорциональному коэффициенту регулятора УОЗ 1 (высокие RPM), если ошибка положительна (EFREQ > 0) или Пропорциональному коэффициенту регулятора УОЗ 2 (низкие RPM), если ошибка отрицательная (EFREQ < 0).</font>
<font>Величина приращения УОЗ: (KUOZ * FREQ) ограничивается величинами UDMIN и UDMAX взятыми из соответствующих таблиц Минимальное и Максимальное смещение УОЗ.</font>
<font>Фактический смысл этого регулирования заключается в том, что чем больше м отдалились от заданных оборотов, тем больше изменится УОЗ в сторону для обеспечения возврата к ним. Причем Коэфф 1 валит обороты сверху, а Коэфф 2 поднимает снизу.</font>
<font>Работа ПИ-регулятора</font>
<font> Другой регулятор это регулятор по воздуху, который отвечает за работу РХХ. Его механизм регулирования сложнее П-регулятора, тк у РХХ нет четко заданной уставки для ХХ. Те РХХ приходится регулировать от того положения в котором он находится в момент наступления ХХ. Поэтому очень важно чтобы когда этот момент наступает, РХХ находился как можно ближе к тому положению в котором будет осуществляться регулирование. Для этого надо настроить Принудительный ХХ, о чем написано выше.</font>
<font>Итак, работа ПИ-регулятора описывается формулой: </font>
<font>SSM = SSM + TMFR * (KFR * EFREQ + KFRI * (EFREQ — EFRET)), где:</font>
<font>SSM — положение РХХ, шаг.</font>
<font>TMFR — Жесткость регулятора частоты вращения — Коэффициент задающий силу изменения положения РХХ в зависимости от разницы оборотов от заданных.</font>
<font>KFR — Пропорциональный коэффициент РХХ — как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.</font>
<font>KFRI — Интегральный коэффициент РХХ — Временной коэффициент, изменяет шаги РХХ, в зависимсти от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.</font>
<font>EFREQ — Текущая ошибка оборотов при регулировании</font>
 Регулятор холостого хода: Принцип работы, неисправности, виды регуляторов
Регулятор холостого хода: Принцип работы, неисправности, виды регуляторов<font>EFRET — Ошибка оборотов на предыдущем цикле регулирования</font>
<font>Если разница оборотов заданных и текущих превысила Ограничение оборотов для интегратора, то она принимается равной этой величине.</font>
<font>Физический смыл регулятора сводится к тому, что чем больше отклонились обороты от заданных и чем больше по времени они были отклонены, тем больше будет разница в положении РХХ между текущим и следующим. Те в отличие от П-регулятора УОЗ, регулирование осуществляется ступеньками, РХХ будет приближаться к положению регулирования не мгновенно, а значит возможно перерегулирование и вхождение системы в резонансный расколбас.</font>
<font>Выбор оборотов ХХ</font>
<font> Для начала надо выбрать обороты, на которых будет происходить регулирование ХХ. Лучше не жадничать и выбрать обороты на 50 больше гарантированных, тк в процессе движения, они будут опускаться ниже ХХ и надо чтобы мотор не заглох.</font>
<font>Настройка регуляторов</font>
<font> Если до сих пор не стало понятно, то скажу, что мы никак не можем повлиять на положение УОЗ или РХХ на ХХ. Поэтому единственное чем мы можем оперировать, это коэффициентами. Причем нам надо это делать так, чтобы во время настройки УОЗ, нам не мешал РХХ и наоборот. Поэтому нам понадобится инженерный блок (ОЛТ — Он Лайн Тюнер), в котором можно зафиксировать положение как и УОЗ, так и РХХ.</font>
<font>Настройку будем проводить в три этапа: настраиваем ПИ-регулятор РХХ до вменяемых ХХ, затем П-регулятор УОЗ, и затем точно настраиваем ПИ-регулятора, тк после установки УОЗ он уйдет. В принципе можно сразу начать с УОЗ регулятора, если ХХ все-таки есть и держится, но в запущенных случаях все же лучше начать с РХХ.</font>
<font>Процесс займет какое-то время, поэтому во врем трахтения на ХХ будет включаться вентилятор, и РХХ будет скакать на Смещение РХХ при включении вентилятора поэтому на время работы делаем его 0 шагов. Не забудьте по завершению вернуть обратно!</font>
<font> </font>
<font>Этап 1. Предварительная настройка ПИ-регулятора РХХ.</font>
 Печать в Excel без полей
Печать в Excel без полей<font> Выставляем Ограничение оборотов для интегратора в две трети значения разности между заданными оборотами ХХ и первым Переходным режимом. Например ХХ = 1100, обороты первого режима = 1400, тогда Ограничитель будет как (1400 — 1100) * 2/3 = 200. Это необходимо, чтобы подхватывалось регулирование в момент входа в ХХ и при этом не было бы перерегулирования и резкого провала по оборотам. Значение 2/3 эмпирическое, мной придуманное, может кого-то не устроить. В любом случае, делать Ограничение больше разницы ХХ и ХХ1 нет смысла.</font>
<font>Итак, открываем в Окно диагностики в ОЛТ и в Прямом управлении фиксируем УОЗ, например на 15 градусах. Далее лезем в коэфф ПИ-регулятора и ставим Интегральный в 0 для того чтобы не мешалось изменении РХХ, от того что обороты долго висят вне заданных. Те на текущем этапе настраиваем только Пропорциональный коэфф. Попробуйте поставить его в 0, а затем в максимальное положение, просто понаблюдайте, что происходит с оборотами, не удивляйтесь если мотор заглохнет. J Задача поймать такой пропорциональный коэфф, чтобы РХХ вставал навстречу изменяющися оборотам. Это хорошо видно на графиках. Обороты как бы должны перестать быть волнообразными, если они будут рваными, но примерно придерживаться заданных, это то что нам нужно для настройки П-регулятора УОЗ!</font>
<font> </font>
<font>Этап 2. Настройка П-регулятора УОЗ.</font>
<font> После того как мы добились вменяемого ХХ, который не плавает волнами, надо настроить УОЗ-регулирование. Для этого надо понять в каких пределах мы можем с помощью УОЗ влиять на обороты. Фиксируем РХХ, как мы раньше фиксировали УОЗ, на примерно среднем положении в котором он пребывает и начинаем двигать углом, так же через прямое управление. При увеличении угла обороты должны расти, а при уменьшении опускаться. Причем, если при увеличении УОЗ, они растут, то при дальнейшем увеличении они начинают опять падать. Крутим вверх, запоминаем угол, при котором обороты еще растут, но скоро будут падать, например это 27 градуса (при 30, например уже начинается спад). Дальше крутим вниз до порога, при котором работа двигателя еще устойчива и обороты реагируют на уменьшение УОЗ и запоминаем его, например это 5 градусов (при 3, уже начинается неустойчивая работа или УОЗ перестает влиять.</font>
<font>Рассчитываем средний угол, который и будет углом зажигания. УОЗХХ = (27 + 5) / 2 = 16.</font>
<font>Рассчитываем максимальную величину смещения: UDMAX = — UDMIN = 27 — 16 = 11</font>
<font>Выставляем в прошивке УОЗ на ХХ 16 градусов, Коррекция УОЗ на ХХ поднимаем/опускаем так, чтобы оно было равно 0 при рабочих температурах. Смотрим, какое наполнение мотора на ХХ, и в калибровках Максимального и Минимального смещения УОЗ выше этого наполнения ставим 1 и -1 градус соответственно, а ниже и при нем, 11 и -11 соответственно, тем самым не давая вывалиться углу за адекватные пределы регулирования.</font>
<font>Зона нечувствительности выставляем 10 оборотов, тк УОЗ-регулирование это все-таки точная настройка на малых отклонениях.</font>
<font>Смотрим на обороты, вернее на то как они меняются и на то как УОЗ этому противостоит. Задача, играя Коэфф, сделать так чтобы УОЗ выстреливал на встречу скачку оборотов несколько больше чем это нужно, как бы упреждая раскачку оборотов. Те УОЗ должен резко ломаться, не должен быть плавным и волнообразным. Сначала настраиваем Высокие обороты выставляя в 0 Коэфф2, и меняя Коэфф1 от 0 и вверх. Затем начинаем повышать Коэфф2 от 0 так же вверх, следя за изменением реагирования УОЗ на изменение оборотов. Если взять большие Коэфф, то работа мотора будет резкой, жесткой на слух, произойдет перерегулирование и обороты опять начнут плясать. В идеале получаем скачущий УОЗ навстречу изменениям в оборотах.</font>
<font>На этом настройка П-регулятора закончена и опять переходим к ПИ-регулированию с помощью РХХ, не забыв зафиксировать УОЗ на наших вычисленных 16 градусах.</font>
<font> </font>
<font>Этап 3. Окончательная настройка ПИ-регулятора РХХ.</font>
<font> Теперь нам фактически надо повторить первый этап настройки, те добиться неплавающего волной ХХ, меняя П-коэфф регулятора, не трогая И-коэфф, который равен 0. Разница в том, что м теперь делаем это при правильном угле и в будущем нам будет помогать УОЗ регулятор, но для начала нам надо правильно настроить Жесткость РХХ, чтобы она соответствовала условиям работы. Раньше ее настраивать не имело смысла, тк наполнение было бы другим.</font>
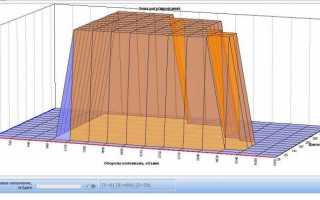
<font>Смотрим обороты ХХ и наполнение при них, лезем в Жесткость РХХ и делаем так, чтобы при ХХ и наполнении на ХХ, в таблице стоял коэфф 1, а при отклонении от Режимной Точки ХХ, Коэфф увеличивался и чем больше отходил бы, тем больше он был бы. Получится как бы трехмерная чашка, у которой на дне Режимная Точка ХХ с коэфф 1 и по мере отдаления от ней Коэфф растет. </font>
<font>Вот примерно так:</font>
<font> 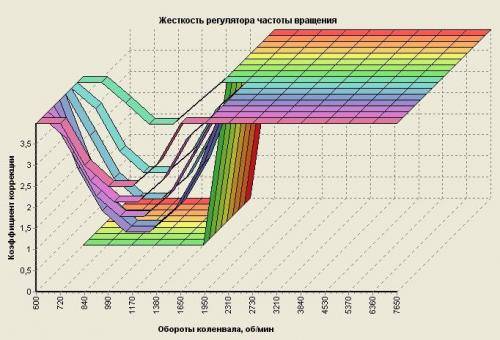 </font>
</font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> </font>
<font> Тем самым мы обеспечили быстрое изменение числа шагов РХХ при удалении оборотов от заданных. Теперь донастраиваем П-коэфф, к этому времени, обороты уже должны быть достаточно устойчивыми и РХХ будет колебаться несильно, отзываясь на достаточно сильные изменения оборотов.</font>
<font>Теперь дошла очередь до И-коэффициента. Увеличиваем его, плавно с 0, по одному шагу, смотрим что происходит с РХХ и оборотами. Увеличиваем до тех пор, пока РХХ и за ним обороты не начнут скачком, неожиданно изменяться то верх то вниз от устойчивого состояния, делаем пару-тройку шагов назад и успокаиваемся. Как показала практика, численные значения И-коэфф колеблется от 1/5 до 1/10 от П-коэфф. В общем когда он маленький, обороты неплохо регулируются, только иногда медленно сбрасываются.</font>
<font>Настройка закончена, возвращаем все в нормальный режим, отключаем Прямое управление, Смещение РХХ при вентиляторе ставим как было (кстати и его можно настроить). Нажимаем на газ, бросаем, смотрим как обороты возвращаются к ХХ, радуемся.</font>
<font> </font>
<font>Собственно так настраивается большинство моторов. Причем весьма и весьма успешно. </font>
<font> </font>
<xml><o><o>800×600</o></o></xml><xml><w><w>Normal<w>false<w>false<w>false<w>RU<w>X-NONE<w>X-NONE<w>MicrosoftInternetExplorer4</w></w></w></w></w></w></w></w></w></xml>
<font>Диагностика и неисправности автомобилей ВАЗ</font>
Настройка холостого хода на Калине (Январь 7.2)
Всем доброго здравия. Хочу поделиться методой, которую использую, для тюнеха ХХ Я7, 1.6 8v моторов. Ни для кого не секрет, что сборка этих моторов, довольно отвратительная, плюс мелкие проблемки, при эксплуатации, а итог — «рваный» и неровный ХХ. Замечено, что если выключить регулирование по ДК, то ХХ довольно ощутимо стабилизируется, но теряем «подстройку» системы, и смесь живёт «своей жизнью». В общем желаемая задача — частичное отключение регулирования на ХХ, и в зоне самых низких оборотов.Итак. Открываем ПО Я7 от Калины (четырки) в Редакторе, и находим «лямбда регулирование», далее калибровку «зона регулирования», и ставим в «0» значения, в зоне низких оборотов, во всём диапазоне нагрузок (первый скрин).В 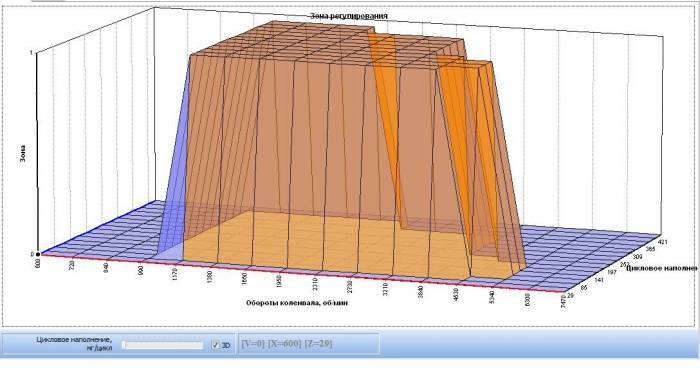 Всё. ДК на ХХ и малых оборотах мы отключили, во всех рабочих режимах, он будет включаться в работу. Далее по желанию (или степени убитости мотора), можно немного добавить топлива на ХХ (желательно с использованием Г.А.).В В
Всё. ДК на ХХ и малых оборотах мы отключили, во всех рабочих режимах, он будет включаться в работу. Далее по желанию (или степени убитости мотора), можно немного добавить топлива на ХХ (желательно с использованием Г.А.).В В 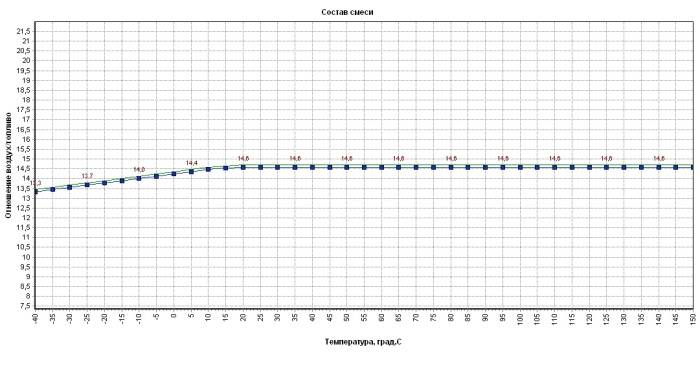 В Открываем набор калибровок «Холостой Ход», калибровку «Сотав смеси», и чуток обогащаем (второй скрин). Получаем достаточно ровный и красивый ХХ, и работающий в нужных режимах ДК.В Автор: ервик (chiptuner.ru)Примерно так. Удачи.
В Открываем набор калибровок «Холостой Ход», калибровку «Сотав смеси», и чуток обогащаем (второй скрин). Получаем достаточно ровный и красивый ХХ, и работающий в нужных режимах ДК.В Автор: ервик (chiptuner.ru)Примерно так. Удачи.
- Разместил: admin1
- Комментарий: 0
- Прочитано: 9728
Вернуться of your page —>
Смотрите также связанные новости
 |
Замена ЭБУ Bosch 7.9.7 на Январь 7.2 |
|
Простейший K-line адаптер своими руками |
|
OpenDiag 1.4 free (программа для диагностики ВАЗ, ГАЗ, УАЗ) |
|
Диагностический разъем OBD II |
|
Коды неисправностей ВАЗ |
Используемые источники:
- http://injonl.ru/articles/nastr_xx.html
- https://kipdoc.ru/diagnostika_vaz/28-nastroyka-holostogo-hoda-na-kaline-yanvar-72.html

 Обзор квадрокоптера DJI Phantom 4 Pro – Инструкция пользователя и интересные особенности гаджета
Обзор квадрокоптера DJI Phantom 4 Pro – Инструкция пользователя и интересные особенности гаджета Ультимативное руководство по DJI GO 4: главный экран и настройки камеры
Ультимативное руководство по DJI GO 4: главный экран и настройки камеры Пульты дистанционного управления Nice для автоматических ворот и шлагбаумов.
Пульты дистанционного управления Nice для автоматических ворот и шлагбаумов. Настройка маршрутизатора Zyxel Keenetic Lite II
Настройка маршрутизатора Zyxel Keenetic Lite II