Содержание
- 1 Технические характеристики собираемого квадрокоптера
- 2 Инструменты, которые нужны для сборки квадрокоптера
- 3 Немного о сборке
- 4 Сборка рамы
- 5 Моторы
- 6 Провод питания
- 7 Привязка и установка приемника
- 8 Камера
- 9 Финальная сборка
- 10 Настройки в Betaflight
- 11 Первый полет
- 12 Таблица компонентов и примерные цены
- 13 Фотографии
- 14 Почему квадрокоптеры нужно калибровать?
- 15 Как понять, что нужна калибровка?
- 16 На какой высоте калибруют?
- 17 Виды калибровки
- 18 Как решить проблемы с пультом управления/джойстиком
- 19 Как подготовить квадрик к полёту
- 20 Как связать пульт и дрон
- 21 Видео
- 22 Принцип работы квадрокоптера
- 23 Назначение настройки при полете
- 24 Видео
Сегодня будем собирать гоночный квадрокоптер своими руками на раме iFlight XL5 V3. Дрон, который получится из этой сборки будет очень крутым для фристайла как по цене, так и по техническим характеристикам, но главный упор конечно же — цена.
Цель сборки — собрать гоночный квадрокоптер с качественными компонентами, но за максимально низкую цену. В ходе сборке получилось не только уложиться в небольшую цену, но и сократить количество точек пайки! Дело в том, что контроллер полета уже имеет встроенный видеопередатчик, поэтому его не нужно паять. Все, что вам нужно будет спаять, это провода двигателей, провода питания и припаять провода приемника.
Технические характеристики собираемого квадрокоптера
- Контроллер полета F4;
- Видеопередатчик 600 mW;
- Камера Eagle 2 CMOS;
- Датчик тока;
- Качественные моторы 2306;
- Всего 17 точек пайки.
Инструменты, которые нужны для сборки квадрокоптера
Хоть это и довольно простая сборка, вам все равно понадобятся некоторые инструменты. Наиболее важный — это паяльник. Он нужен в нашем хобби и если вы собираетесь долго этим увлекаться, то купите какой-нибудь хороший, хотя бы такой.
Далее, вам понадобится следующее:
- Шестигранные ключи на 1,5 и 2 мм;
- Пинцет;
- Кусачки;
- Ножницы;
- Фен для пайки или зажигалка;
- Линейка;
- Мультиметр;
- Паяльник.
Дополнительные материалы:
- Термоусадка;
- Синий фиксатор резьбы (хотя я использую красный);
- Пластиковые стяжки (маленькие);
- Припой 63/37;
- Флюс.
Немного о сборке
Чтобы прикрепить верхнюю пластину, я использовал скрытые шайбы и винты с плоской шляпкой, но это делать необязательно, мне просто захотелось сделать дрон немного ярче.
Так как двигатели для этой сборки продаются без крепежных винтов, то вам нужно еще докупить и их — шестигранные винты М3 х 6 мм.Лучше купить сразу набор из 100 штук. Также, некоторые винты для сборки рамы я использовал с антивибрационными подушками.
Сборка рамы
Рама идет в комплекте с подробной инструкцией, поэтому особо добавить нечего. Гайки без пластинок антискольжения, поэтому их нужно фиксировать при закручивании.
Обратите внимание на заостренные концы на лучах, они должны быть направлены на внешнюю сторону, чтобы случайно не прикрутить их в обратную сторону.
Для монтажа башни из полетного контроллера и регулятора оборотов (FC и ESC) вместе с рамой идут винты на 15 мм. Также, чтобы отделить раму от регулятора оборотов, в комплекте идут резиновые антивибрационные биты, их нужно вставить между платой и рамой. Как вы поняли, они защитят от вибраций полетный контроллер, так как там установлен гироскоп. Далее, ставите специальные опоры, на которые потом установите полетный контроллер.
 R13-PROJECT
R13-PROJECTСейчас полетный контроллер ставить еще не нужно! Поставите позже.
Моторы
Хоть это и необязательно, но я использую оплетку для проводов.
Это прибавляет такой брутальности вашему дрону. Можете использовать, например, оплетку диаметром 6 мм, так как 4 мм будет маловата, ссылка будет в конце статьи.
- Отрежьте 4 куска шнура по 7 см и оплавьте концы, чтобы они не распушились. Наденьте оплетку на провода и наденьте на края по куску (2 см) термоусадки, чтобы закрыть концы.
- Прикрутите двигатели к лучам рамы с помощью винтов М3 х 6 мм, предварительно обмазав резьбу синим фиксатором резьбы.
Фиксаторы резьбы продаются в автомагазинах.
- Теперь начните припаивать провода моторов к площадкам на регуляторе оборотов. Старайтесь припаять так, чтобы контактная площадка была полностью в припое. Начинайте паять с дальнего края, к себе.
- Если провода длинные, укоротите их, чтобы они не торчали и потом припаивайте.
- После того, как провода будут припаяны, подвиньте термоусадку к краю и усадите ее зажигалкой или феном.
















Провод питания
Контроллер полета идет в комплекте с конденсатором и его тоже нужно припаивать. Конденсатор позволяет сглаживать скачки напряжения и предотвращает помехи на видео.
Убедитесь в правильной полярности контактов (плюс к плюсу, минус к минусу), примерьте его у контактов питания на плате регулятора оборотов, укоротите ножки и залудите (нанесите припой). Теперь возьмите кабель питания и при необходимости тоже залудите. Разместите конденсатор с нижней стороны платы, а кабель питания сверху, чтобы они не мешали друг другу. Припаяйте.
Привязка и установка приемника
Мне нравится этот полетный контроллер, потому что он идет с разъемом для приемника. Я использую в этой сборке приемник FrSky XM+, но вы можете использовать любой совместимый с SBUS протоколом приемник.
- Если вы не используете последовательный приемник 3,3V, то отрежьте (или отковырните) зеленый провод у коннектора с проводами.
- Теперь припаяйте оставшиеся 3 провода к контактам на приемнике.
- Далее разместите полетный контроллер в общую башню и подключите его к регуляторы оборотов (ESC) с помощью коннектора с проводами.
- Четвертым шагом идет подключение антенны к видеопередатчику. ЗАПОМНИТЕ! Никогда не включайте видеопередатчик (по факту сам дрон) без антенны на видеопередатчике, потому что он сгорит.
- Теперь поправьте еще раз все провода, чтобы было аккуратно и закрепите полетный контроллер поверх всего пластиковыми гайками.
Камера
Можно использовать Runcam Eagle 2, но их уже не производят и возможно, когда вы будете читать, все уже раскупят, поэтому можно использовать любую альтернативу, в нашем случае это Runcam Micro Eagle, но для нее требуется переходник (обычно идет в комплекте) для дронов стандартных размеров.
Перед подключением камеры, вам нужно установить боковые крепления или переходник, используя винты М2, а также пластиковые прокладки. Установите камеру так, чтобы она была ровно по центру по горизонтали.
После прикрепления, подсоедините коннектор с проводами, который идет с камерой к полетному контроллеру.
 -->Персональный сайт Пьяных А.В. -->
-->Персональный сайт Пьяных А.В. -->Теперь можете настроить камеру. Подключите аккумулятор и проверьте, есть ли видео (у вас должен быть FPV шлем или очки. Для настроек — подключите к камере специальный джойстик.
Обычно настройки по умолчанию идеальны и не требуют изменений.
Финальная сборка
Теперь все, что нужно сделать, это установить верхнюю панель и закрепить антенну видеопередатчика. Для начала привинтите стойки к верхней панели с помощью винтов 6 мм или скрытыми шайбами, как я. Антенну рекомендую закрепить двумя пластиковыми стяжками.
Рама шла с специальными вспененными подушками для аккумулятора, но я решил купить другую, липкую, на такой аккумулятор будет держаться надежнее.
Теперь остается соединить верхнюю панель со стойками к нижней и все, сборка завершена!
Настройки в Betaflight
Если вы еще не скачали Betaflight и BLHeli Configurator, то вам сюда: https://profpv.ru/kak-i-gde-skachat-betaflight-configurator/
А если не знаете, как прошивать квадрокоптер, то вам сюда: https://profpv.ru/kak-proshit-poletnyj-kontroller-i-esc-blhelli-p/
- Вам нужно прошить полетный контроллер, перейдите в Firmware Flasher и выберите OMNIBUSF4SD с последней версией стабильного релиза.
- Нажмите «Load Firmware [Online]» и «Flash Firmware» для прошивки полетного контроллера. По окончанию, нажмите Connect.
Для дальнейшей настройки нужно подключить аккумулятор, а также включить пульт управления.
Betaflight configurator, настройка на русском: https://profpv.ru/betaflight-nastroyka/
- На вкладке Receiver проверьте, чтобы pitch, roll, throttle и yaw соответствовали движению стиков на вашем пульте. При необходимости, выполните настройки.
- На вкладке Motors сделайте проверку двигателей, для этого ползунком подайте на двигатели немного напряжения с помощью ползунка. Запомните те, что крутятся не в ту сторону.
Все! Настройки Failsafe по умолчанию работают хорошо, но на всякий случай проверьте и их, подробнее здесь:
Failsafe: что это такое, как работает и настройка
Первый полет
При установке пропеллеров руководствуйтесь схемой на вкладке Configuration — там будет показано, в какую сторону должны крутиться пропеллеры с моторами.
Помните о технике безопасности и не делайте резких движений газом (да и вообще стиками), пропеллеры очень опасны на больших оборотах и легко прорубят кожу.
 Настройка профиля Алиэкспресс
Настройка профиля АлиэкспрессНу и само видео сборки:
Таблица компонентов и примерные цены
| Компонент | Название | Ссылка | Цена ~ |
| Рама | iFlight XL5 V3 240mm FPV Freestyle | Aliexpress | Banggood | 37.15$ |
| Полетный контроллер | LDARC KK Super Fly Tower 30.5*30.5 | Aliexpress | Banggood
На Aliexpress заказывать по отдельности регулятор и полетный контроллер, комплекта у них нет. |
70$ |
| Моторы | LDARC XT2306 2500KV | Aliexpress | Banggood(по 2 мотора 2500KV CCW и CW) | 15$/шт |
| Пропеллеры |
Gemfan Hulkie 5055 |
Aliexpress | Banggood | 3.5$ |
| FPV камера | RunCam Micro Eagle | Aliexpress | Banggood | 45$ |
| Антенна | Newest EMAX Pagoda 3B | Aliexpress | Banggood | 6.17$ |
| Приемник | Frsky XM+ Plus Micro | Aliexpress | Banggood | 13$ |
| FPV шлем или очки | — | FPV шлем и FPV очки, что это и как работает | |
| Аккумуляторы | AHTECH Infinity 4S 85C | Aliexpress | Banggood | 25$ |
| Винты | M3CH4 M3 | Aliexpress | Banggood | 3.95$ |
| Скрытые шайбы | — | Aliexpress | Banggood | 14.99$ |
| Переходник с маленькой камеры, на большую | Fixed Mount TPU | Aliexpress | 2.19$ |
| Антискользящие наклейки | Adhesive Sticky | Aliexpress | 1.25$ |
| XT60 коннектор для питания | XT60 коннектор для питания | Aliexpress | Banggood | 0.93$ |
| Аппаратура управления | — | Аппаратура управления квадрокоптером, какая бывает и как выбрать | |
| Паяльник | — | Aliexpress | Banggood | 6.53$ |
| Ключ для закручивания гаек пропеллеров | — | Aliexpress | Banggood | 3.89$ |
| Припой 63/37 | Kaina | Aliexpress | Banggood | 2.95$ |
| Оплетка для проводов | — | Aliexpress | 1.59$ |
Фотографии
Если у вас есть вопросы, задавайте их в комментариях 
Если вы нашли ошибку или ссылку, которая не работает, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
<index>
Здравствуй, пилот! Калибровка квадрокоптера, или его триммирование, как ты, наверное, уже знаешь, важный этап его создания и использования. Бывает, что аппарат начинает вести себя не так, как ты этого хочешь. Это нужно срочно исправлять, и сегодня я расскажу тебе как это сделать. Располагайся поудобнее, погнали!
Так как это достаточно трудоёмкий процесс, пусть и простой, то будь готов к тому, что ты зависнешь на этом на несколько часов. (сложно будет особенно начинающим пилотам) Конечно, если ты хочешь добиться хорошего результата. Для начала нужно чётко понять с какой именно осью у тебя проблемы. Не иди методом научного тыка, он здесь не поможет.
Почему квадрокоптеры нужно калибровать?

Квадрик в полёте может вести себя неадекватно. Например, устройство может кренится в одну из сторон или вращаться вокруг своей оси. Здесь на помощь и приходит триммирование квадрокоптера. Она позволяет скорректировать поведение коптера через настройку контроллера.
Как понять, что нужна калибровка?
Для начала нужно поднять дрон на высоту и попробовать полетать. При получении с пульта команды «вперёд», дрон должен лететь вперёд, а не вперёд и чуть влево, вверх, вниз, или ещё куда-то. Так нужно проделать со всеми направлениями, лучше даже в разных режимах полёта. Если по какой-то из осей наблюдаются отклонения- нужно калибровать.
На какой высоте калибруют?
Дрон нужно калибровать в воздухе, на высоте больше 0.5 метра. Это достаточно большая высота, чтобы ничего не влияло на его подъёмную силу. Также лучше выбрать безветренную погоду.
Виды калибровки

Калибровка происходит следующим образом:
- Включаем передатчик радиоуправления (на момент калибровки регуляторов радиоуправление должно быть уже откалибровано). Выставляем ручку газа на максимум
- Берем Li-Po аккумулятор и подключаем к разъему Power-модуля для включения автопилота. Питание регуляторов соответственно тоже будет обеспечивать этот аккумулятор
- После включения APM будет мигать своими синими и красными светодиодами. Этим он сигнализирует готовность к калибровке при следующем включении. Отключаем аккумулятор от Power-модуля
- Включаем питание заново. Регуляторы издают стандартный звуковой сигнал (обычно количество сигналов равно количеству банок в батарее) и через некоторое время дважды издает короткий сигнал, что подтверждает калибровку по максимальному газу
- Опускаем ручку газа в минимальное положение. Регуляторы издают один долгий сигнал, что подтверждает калибровку по минимальному газу
- С этого момента калибровка регуляторов для APM 2.8 завершена и можно проверить работоспособность моторов
- Убираем газ на минимум и выключаем питание Ardupilot.
Как решить проблемы с пультом управления/джойстиком

Неожиданно, но надо триммировать. С этим мы уже разобрались раньше. Проблема может быть, как с левым, так и с правым джойстиком. Чтобы это узнать, нужно поднять коптер в воздух, и наблюдать.
- Если аппарат кренится вправо, то триммировать надо правый рычаг пульта по крену
- Если есть наклон вперёд или назад, то нужно править левый стик, используя триммер тангажа
- Если коптер летит по диагонали, то нужно работать с обоими стиками
Как подготовить квадрик к полёту

До взлёта нужно настроить гироскоп и GPS. Обычно это делается очень просто, но у каждого коптера эта функция вызывается по-своему. Этот процесс всегда подробно описан в инструкции.
Если это первый полёт, то для коптера RTF (ready to fly) нужно настроить только гироскоп и GPS. Для самодельного БПЛА процесс подготовки к первому полёту будет сложнее.
Нужно:
- Привязать пульт управления квадрокоптером
- Настроить параметры тяги через соответствующий софт (например, mission planer, о котором мы говорили ранее)
- Настроить вспомогательные системы (GPS, гироскоп)
- Запустить на высоту 0.5 метра, и при необходимости, подкрутить регуляторы оборотов.
Как связать пульт и дрон

И снова, скорее всего, придётся обратиться к инструкции, ибо процесс может происходить по-разному, в зависимости от модели. Я приведу пример того, как это происходит в большинстве случаев.
Трёхосный коптер
Просто включи пульт и подожди около десяти секунд. Он начнёт издавать сигналы, и длинный сигнал будет означать, что пульт присоединился.
Шестиосный коптер
Включи пульт управления. Подними стик газа вверх, до максимального значения. После опусти стик в самый низ. Пульт воспроизведёт звуковой сигнал, который будет означать, что он нашёл коптер.
Видео
Для простоты восприятия – вот тебе толковый видео обзор, в котором парень рассказывает про настройку и калибровку коптера.
Как ты уже, наверно понял, в настройке коптера нет ничего сложного. Если что-то не получается, то задавай вопросы в комментарии, и мы постараемся на них ответить.
Если коптер ведёт себя совсем неадекватно, или не выдаёт нужной мощности, то есть смысл проверить сами компоненты. Есть шанс, что ты что-то не так подключил, или выбрал неправильные регуляторы скорости. (об этих нюансах ты тоже можешь прочитать на нашем сайте).
Ну и традиционное. Буду очень рад, если ты подпишешься на наши группы в социалках. Там ты сможешь найти много интересного. Удачи, пилот! До скорых встреч.
</index>

Большинство моделей беспилотников попадают на прилавки магазинов откалиброванными со специальной маркировкой на упаковке. Но настройка квадракоптера все же требуется, так как калибровка производителей может «слететь» в результате небрежной транспортировки. Рассмотрим подробнее как самостоятельно настроить квадрокоптер и для чего нужно триммирование.
Принцип работы квадрокоптера
Работа квадрокоптера основана на принципах механики. Полет регулируется ускорением или замедлением пропеллеров. Квадрокоптер не может самостоятельно сохранять устойчивое положение во время полета. Для этого конструкция оснащена бортовым компьютером. На основании показаний гироскопов и акселерометров, контролер позволяет беспилотнику находиться в воздухе в определенном положении.

Назначение настройки при полете
Для чего нужна настройка квадрокоптера? Без нее дрон будет кренить на один борт и не сможет лететь в пункт назначения, определенный владельцем. Управлять полетом в таких условиях невозможно и есть риск привести беспилотник в негодность раньше времени. Те, кто не умеют обращаться с устройствами, списывают проблемы с полетом на заводской брак, низкое качество товара и на другие причины. На самом деле требуется установка настроек.
Как определить, нужно ли откалибровать квадрокоптер? Достаточно провести короткий полет, и просмотреть, как беспилотник ведет себя в пространстве. Для этого устройство поднимается в воздух хотя бы на полметра. Если траектория полета хаотичная – ему требуется калибровка. Слишком низкая высота мешает настраивать машину. Квадрокоптер держится в воздухе благодаря воздушной подушке, которую создают винты.
Типы калибровки
Есть несколько видов триммирования:
- Механическое — при незначительном отклонении необходимо подкрутить регулятор тяги;
- Автоматическое –если нужно сместить триммер на 5 позиций и больше. Устройство настраивается с пульта дистанционного управления.
Механическая калибровка квадрокоптера требует всего нескольких минут, а вот автоматическую выполнять сложнее и дольше. Выполняется работа с переключателями. Один раз откалибровать устройство иногда мало и требуется калибровка до тех пор, пока беспилотник не встанет в нужное положение. При наклоне влево треммирование выполняется в правую сторону для равновесия.
Подготовка устройства к полету
Перед тем, как запустить дрон, нужно выполнить несколько простых шагов:
- Вставить аккумулятор внутрь устройства без включения. (не относится к моделям, со встроенной батареей);
- Чтобы настройка прошла быстрее, требуется поставить дрон на ровное место (к примеру на стол);
- Далее нужно взять квадрокоптер в руки и включить его, а затем поставить на поверхность;
- В новых моделях синхронизация гироскопов занимает примерно 10-20 секунд.

Триммер
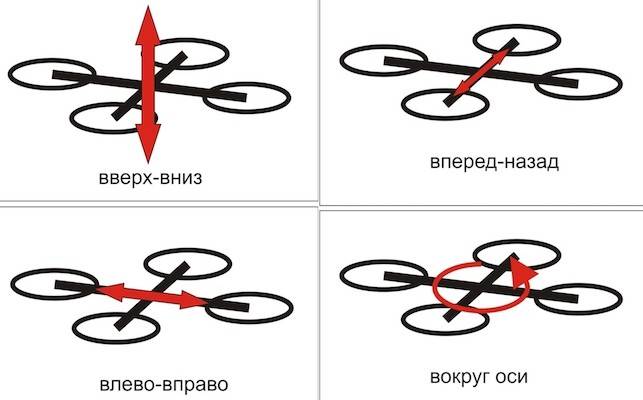
Джостики для квадрокоптера обычно имеют стандартные кнопки и функции:
- На джостике есть правый и левый стики. В правом – вертикальное перемещение дрона и наклон вперед, а в левом – горизонтальное передвижение;
- Верхняя левая кнопка отвечает за переключение скорости;
- Верхняя правая кнопка – поворот устройства на 360 градусов;
- Слева по направлению от правого стика – переключатель движения «вперед-назад»;
- Переключатель режимов находится под правым стиком.
- Кнопка включения и выключения квадрокоптера располагается в центре джостика.
- Под кнопкой включения – дислпей, отвечающий за расходы. Высокие расходы для быстрых полетов, низкие- для малой высоты.

Определение проблем
Как выполнять триммирование исходя из положения дрона в пространстве? Есть несколько основных проблем во время полетов:
- Если наблюдается крен в правую или левую сторону, то проблема в правом рычаге и требуется регулировка по крену.
- Если устройство без команды пользователя наклонилось вперед, а потом назад и в обратном порядке, выполняется регулировка по тангажу левым стиком.
- Если в движении есть и крен и наклон, настраивать нужно оба стика.
Триммирование позволяет настроить полет, чтобы избежать столкновений с домами и деревьями. Это не только продлит срок службы квадрокоптера, но и обезопасит окружающих людей. Вся информация о том, как откалибровать конкретный беспилотник указана в инструкции по эксплуатации. Также в ней есть сведения о том, требуется ли калибровка для дрона. Но, в некоторых моделях, особенно тех, что относятся к категории бюджетных, инструкция отсутствует.
Рекомендуем проводить калибровку, так как она поможет по крайней мере, познакомиться с джостиком и привыкнуть к стикам. Лайфхак от любителей квадрокоптеров: рекомендуется сразу переходить на высокие расходы, не засиживаясь на низких, чтобы привыкнуть к чувствительности стика.
Видео
Используемые источники:
- https://profpv.ru/gonochnyj-kvadrokopter-svoimi-rukami/
- https://drongeek.ru/novichkam/kalibrovka-kvadrokoptera
- https://smart-planets.ru/kvadrokopter/nastrojka-kvadrokoptera/


 Как подключить MIDI устройство к Fl Studio
Как подключить MIDI устройство к Fl Studio Обзор характеристик и использование контроллера температуры REX C100
Обзор характеристик и использование контроллера температуры REX C100 Жерлица – правильная сборка и установка, для охоты за щукой зимой
Жерлица – правильная сборка и установка, для охоты за щукой зимой Квадрокоптер DJI Mavic 2 Pro. Инструкция на русском. Обзор.
Квадрокоптер DJI Mavic 2 Pro. Инструкция на русском. Обзор.