Содержание
Наш канал в Telegram
Коничива, уважаемый!
За время вашего отсутствия мы тут вон чего понаписали:
На Mavic 2 Pro я пересел с первого Мавика (20+ часов и 170+ км налёта) и, вполне логично, многие настройки сделал такими же. Наибольшее отличие от «единицы» в плане настроек заключается в камере, но об этом подробнее в соответствующем разделе. Ниже список моих настроек, актуальных для прошивки версии 01.00.0200 и приложения DJI GO версии 4.3.4. Для DJI Mavic 2 Zoom отличия будут только в настройках камеры.
<center>ДИСКЛЕЙМЕРВо многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.</center>
Общие настройки
Main Controller Settings
RTH at Current Altitude - отключено. Немного странноватый и даже опасный пункт: возврат домой на текущей высоте. Работает, только если квадрокоптер не далее 20 метров от точки "дом". Понятно, что сделано чтоб не гонять его на высоту, но опасно как-то. Enable Intelligent Flight Modes - отключено, Sport Mode не использую. Return-to-Home Altitude - 60 Beginner Mode - отключено Maximum Flight Altitude - 150, законы ЭР Distance Limit - отключено Advanced Settings EXP - 0.25 0.18 0.25, чем меньше, тем плавнее реакция в центральной зоне стика. Выставил, как у меня было на первом Мавике Cinematic Mode Brake Gain - 10 Yaw Sensitivity - 50 RC Signal Lost - Return-to-Home Turn on Aircraft Arm LEDs - отключено, светодиоды на передних лучах Emergency Stop Mode - Push sticks inner/outer (Breakdown). Разрешает экстренное отключение моторов только при падении, а не в полёте
Visual Navigation Settings
У первого Мавика я отключал сенсоры, так как это влияло на скорость в режиме P-Mode. У Mavic 2 ситуация иная: максимальная скорость в P-Mode 50 км/ч независимо от того, включены или выключены датчики. Но, полетав с работающими сенсорами полётов 7-8, я отключил их. Регулярно во время полёта выскакивали сообщения об ошибке тех или иных датчиков, что раздражает.
Enable Forward and Backward Obsticle Sensing - отключено Display Radar Map - отключено Bottom Auxiliary Lighting - Auto, подсветка при посадке. Advanced Settings Enable Downward Vision Positioning - включено, прожектор и камера при посадке Landing Protection - отключено. Кстати, работает только в RTH RTH Obsticle Detection - включено. Обход препятствий при возврате домой. Работает даже если сенсоры отключены (при RTH они включаются)
Remote Controller Settings
Button Customization C1 - Camera Settings C2 - Camera Forward/Down (постоянно использую) 5D Button Customization Up - Camera Forward/Down Down - Metering/Focusing Switch (переключает, что будет происходить при касании экрана - экспозамер или фокусировка) Left - Increase Aperture (прикрыть диафрагму, не работает в ручном режиме съёмки) Right - Decrease Aperture (открыть диафрагму, не работает в ручном режиме съёмки)
Image Transmission Settings
Channel Mode - Auto Image Transmission Mode - Regular Mode (по идее, ничто не мешало оставить HD, но у меня смартфон с относительно небольшим экраном, так что нет смысла перегружать канал)
Aircraft Battery
Одно из нововведений Mavic 2 — саморазряд батареи. Раньше в настройках можно было выставить, через какое время бездействия батарея переходит в режим хранения и разряжается. Сейчас эту настройку убрали, переход в режим начинается через 10 дней и батарея разряжается до 60-65% в течениe ещё 3-4 дней. Примечательно, что она при этом может немного нагреваться.
Smart Return Home - отключено. Тут есть некоторая неясность, так как две разные функции имеют одно название. В мануале к дрону Smart RTH - обычная функция возврата домой, активизируемая специальной кнопкой на пульте. В данном же случае, имеется ввиду возврат домой, когда, по мнению дрона, оставшегося заряда батареи хватает только на возврат. Отключил я её потому, что пару раз на первом Мавике она мешала сделать пару последних кадров перед возвратом. Low Battery Warning - 20%, раньше ставил 25%, но за показателями я и так слежу, просто раздражающее пищание начинается раньше Show Voltage on Main Screen - отключено, мне оно без надобности
Gimbal Settings
Gimbal Mode - Follow, подвес немного подруливает по Yaw Camera Gimbal Advanced Settings Max Gimbal Pitch Speed - 22 Gimbal Pitch Smoothness - 12, "инертность" подвеса Gimbal Pitch Limit - включено, разрешает камере подниматься вверх на дополнительные 30 градусов, но пропеллеры будут попадать в кадр. На практике очень часто использую
General Settings
Units - Metric (km/h) Cache Locally When Recording - включено, дублирует запись видео на телефон Record Audio with Video Cache - отключено, записывает звук с микрофона телефона Largest Video Cache Capacity - 4GB Adaptively Reduce Cache Resolution - отключено, снижает разрешение кэшированного видео, если мало места Auto Video Cache Cleanup - включено, чтобы не следить за памятью
Настройки камеры
Ну вот мы и подошли к самому интересному. Разработчики постарались сделать работу с камерой Mavic 2 максимально схожей со съёмкой на обычный фотоаппарат. Например, кнопка затвора стала двухпозиционной и при слабом нажатии происходит фокусировка, а при полном — съёмка. В настройках, помимо автоматического и ручного режимов съёмки, появилось два новых полуавтоматических. Вот описание всех режимов:
- Auto — автоматический. Настраивается только экспозиция, всё остальное система выставляет автоматически
- A — приоритет диафрагмы. ISO выбирается автоматически или ползунком, экспозиция — ползунком, диафрагма — правым колёсиком, выдержка не настраивается вообще
- S — приоритет выдержки. ISO выбирается автоматически или ползунком, экспозиция — ползунком, выдержка — правым колёсиком, диафрагма не настраивается вообще
- M — ручной режим. ISO и выдержка настраиваются ползунком, диафрагма — правым колёсиком, экспозиция не настраивается вообще
На обычном фотике я использую режим A, здесь для меня был бы более удобен S (чтобы колёсиком выдержку настраивать, как на первом Мавике), но, как оказалось, оба эти режима совершенно бесполезны. Дело в том, что картинка на экране, показываемая в этих полуавтоматических режимах, соответствует выставленным настройкам экспозиции и только. Да, на обычных фотокамерах это работает также, но там после съёмки на секунду на экране показывается сделанный кадр и сразу можно оценить его экспонирование. В случае с дроном, кадр по понятным причинам не показывается и я не могу его оценить и скорректировать настройки. В итоге спасает ручной режим, где на экране отображается то, что и будет на фотоснимке. Ну а теперь настройки.
Режим съёмки - M ISO - 100 (увеличиваю по необходимости) Aperture - 3.2 (как и на большинстве недорогих объективов, лучше избегать использования максимально открытой диафрагмы, может появиться некоторое виньетирование и размытие по углам кадра) Shutter - по ситуации, для видео вдвое больше, чем FPS Photo - Burst 5 (теперь всегда делаю stacking) Image Ration - 3:2 (чтобы получить максимум с матрицы, больше возможностей для кадрирования) Image Format - JPEG+RAW Style - Custom +1 -1 0 (на форумах советуют именно такие настройки под последующую постобработку. +1 к резкости чтобы отключить встроенный шумодав) Color - None Video Size - 4K HQ 30fps (данный режим даёт максимальную чёткость, так как делает кроп с матрицы без масштабирования, в отличие от режима 4K Full FOV, который масштабирует картинку с 5,5K до 4K) Video Format - MP4 White Balance - выбирать профиль при каждой конкретной съёмке Style - описано выше Color - None (поэкспериментировал с "плоскими" стилями, почитал, что в интернетах пишут и остановился на этом профиле. Важный нюанс: в профиле None также включена коррекция искажений линзы, а в остальных она отключена) Encoding Format - H.264 (видеомонтаж H.265 съедает нервы из-за требовательности к "железу" компьютера, а H.264 вполне хватает и не тормозит)
Save Original Panorama - не удаляет исходные снимки панорамы. Раньше включал эту опцию, но ни разу оригинальными снимками не пользовался, в итоге отключил. В теории может пригодиться, если какая-то супер-уникальная панорама сшилась с ошибками и вы это заметили только потом. В этом случае можно сшить самому в стороннем приложении. Save Original Hyperlapse - не удаляет исходные снимки Hyperlapse, как и с предыдущим пунктом, сейчас отключено Histogram - включено Lock Gimbal When Shooting - включено, не дает подвесу двигаться когда снимаем фото AFC - отключено, автофокус будет мешать Auto Sync HD Photos - включено. Раньше отключал, но после того, как утопил квадрокоптер и даже ни одного снимка не осталось, решил включить Video Caption - отключено, записывает технический файл с параметрами видео Overexposure Warning - отключено, раскрашивает переэкспонированные места в "зебру" Front LEDs Auto Turn off - включено, отключает подсветку на лучах во избежание бликов при съёмке. На самом деле мы и так её полностью отключили выше в главных настройках (Main Controller Settings) Grid - по вкусу Center Points - по вкусу Anti-Flicker - у меня эта опция заблокирована, рекомендуют Auto Peaking Threshold - не использую File index mode - Continuous, даёт имена файлов по внутреннему счётчику, который не обнуляется Storage Location - выбор места для сохранения фото/видео Hyperlapse Video Frame - отключено, показывает белой рамкой то, как будет кадрирована картинка при съёмке Hyperlapse
Отключение снижения при разряде батареи
Есть у Мавика одна, весьма неприятная «фича» — неотключаемое снижение при разряде батареи ниже 10%. По своему опыту скажу, что если на таком уровне заряда дрон ещё в воздухе, значит, он возвращается и, скорее всего, издалека. Самое время начинать беспокоиться долетит или нет, а тут ещё автоснижение начинает мешать. Примерно в 60% случаев я летаю над водой, что усугубляет ситуацию. Короче, очень желательно отключить автоснижение. Способ, как это сделать, я нашёл на сайте dji.maximlord.ru/, но там для меня он был описан не совсем понятно. Ниже своими словами.
- Скачать и установить DJI Assistant 2 старой версии 1.1.2-2, потому что в более новых заблокирован режим разработчика.
- Перейти по пути C:Program Files (x86)DJI ProductDJI Assistant 2AppFiles, открыть текстовым редактором файл main.js и раскомментировать (удалить в начале символы //) строку №113:
//mainWindow.webContents.openDevTools() - Не подключая дрон, запустить DJI Assistant 2. Теперь приложение открывается с боковой панелью, как инструменты разработчика в веб-браузере. Там нужно перейти на вкладку Resources (она может быть скрыта за кнопкой >>).
- В Local Storage -> file:// поменять значение двух переменных:
debug изменить на 1 debug_enabled изменить на true - Поключить дрон.
- В пункте Параметры найти переменную
bat_enable_smart_bat_landing_protectи поменять её значение на .
Всё. Но надо понимать, что после обновления прошивки параметр «слетит» и надо будет всё делать заново.
 Полный гайд по настройке кс го
Полный гайд по настройке кс гоЭта статья посвящена дрону DJI Mavic 2 Pro, которым я владею уже больше полугода и содержит как субьективное описание достоинств и проблем, так и кучу фотографий в спойлерах. Все изображения с целью экономии трафика пропущены через оптимизатор mozjpeg. Мой первый дрон в детстве был таким Их у меня было три. Первый не взлетел, потому что я открыл коробку ещё в автобусе по дороге домой и потерял гаечку, которая держит верхнюю треугольную жёлтую плашку, удерживающую лопасти. У второго протёрся пусковой механизм капроновой нитью и лопнула резинка внутри, которая скручивала эту нить обратно. Третий прожил дольше всех, но его унесло ветром. Дальше был этот вертолётик, с которым я игрался дома, потом был такой же, но с камерой, за ним пошли дроны Syma x5 и x8 pro, в пультах которых я перепаивал их убогие антенны на нормальные из wi-fi роутеров и это работало шикарно. Потом был Walkera QR X350 Pro с отдельным подвесом для камеры и китайским аналогом GoPro и вот наконец я взял Mavic 1 Pro на день в аренду и понял, что всё это время я занимался не тем. Я, конечно, его потом купил и год с удовольствием летал, но анонс Mavic 2 Pro лишил меня покоя, а мой бюджет — двух с лишним тысяч австралийских долларов. Итак — вот она, моя прелесть
Их у меня было три. Первый не взлетел, потому что я открыл коробку ещё в автобусе по дороге домой и потерял гаечку, которая держит верхнюю треугольную жёлтую плашку, удерживающую лопасти. У второго протёрся пусковой механизм капроновой нитью и лопнула резинка внутри, которая скручивала эту нить обратно. Третий прожил дольше всех, но его унесло ветром. Дальше был этот вертолётик, с которым я игрался дома, потом был такой же, но с камерой, за ним пошли дроны Syma x5 и x8 pro, в пультах которых я перепаивал их убогие антенны на нормальные из wi-fi роутеров и это работало шикарно. Потом был Walkera QR X350 Pro с отдельным подвесом для камеры и китайским аналогом GoPro и вот наконец я взял Mavic 1 Pro на день в аренду и понял, что всё это время я занимался не тем. Я, конечно, его потом купил и год с удовольствием летал, но анонс Mavic 2 Pro лишил меня покоя, а мой бюджет — двух с лишним тысяч австралийских долларов. Итак — вот она, моя прелесть


Проблемы и особенности, о которых не сказано в спецификациях или в рекламе
Mavic 2 в обычном режиме летает быстрей, чем первый. Настолько быстрей, что к этому пришлось отдельно привыкать и если давить полный газ вперед с небольшим встречным ветром — угол наклона корпуса вперёд делает передние датчики препятствий бесполезными, о чём нам сообщает приложение на телефоне. Пропеллеры в комплекте сразу идут с пониженным содержанием
Пропеллеры в комплекте сразу идут с пониженным содержанием асбеста шума, в то время, как у первого Мавика они были попроще. Оффтоп по пропеллерам с картинкойС этими пропеллерами вышла интересная история — я состоял в паре групп дроноводов в Facebook и там была просто волна истерии по поводу этих пропеллеров от Mavic Platinum — десятки постов с вопросами «а стоит ли покупать?», «я купил и это круто», «а я купил и не почувствовал разницы» и тд. В целом суть такова — эти пропеллеры имеют более оптимальную аэродинамическую форму и создают большую подъёмную силу, чем стоковые при равных оборотах. Как следствие — для того, чтобы просто висеть нужно крутить их медленней, по моим субъективным замерам в духе «плюс/минус километр» — на 20%. Проверялось следующим образом — на пульте есть тахометр, но я только сейчас задумался — обороты какого из четырёх моторов он показывает. Я думаю, что усреднённое значение со всех четырёх. Так вот — со стоковыми пропеллерами там 530 об/мин ± 50 в зависимости от ветра. А вот с пафосными пропеллерами — 420 об/мин ± 50. Как следствие более низких оборотов — звук не то, чтобы тише, он просто ниже по тональности, что в том числе воспринимается и как меньшая громкость. Послушать и сравнить можно здесь: На мой субъективный взгляд снижение оборотов двигателей в целом даёт пару дополнительных минут полёта, поскольку энергии расходуется меньше. Но специально я это не тестировал. Сами пропеллеры — слева Mavic 1, справа — Mavic 2 / platinum. У пульта стики теперь откручиваются, что с одной стороны уменьшает возможность повредить пульт при переноске, с другой — их можно уронить и потерять. Снизу есть дополнительный разъём USB, (как и у первого Мавика) куда можно подключить планшет или телефон или ещё что-нибудь, но этот порт работает только если вытащить боковой кабель, даже если он никуда не подключён. Это в своё время заставило меня думать, что у меня пульт бракованный и помогла только случайность, когда я после зарядки пульта опять подключил к нему планшет без бокового провода и всё заработало.
У пульта стики теперь откручиваются, что с одной стороны уменьшает возможность повредить пульт при переноске, с другой — их можно уронить и потерять. Снизу есть дополнительный разъём USB, (как и у первого Мавика) куда можно подключить планшет или телефон или ещё что-нибудь, но этот порт работает только если вытащить боковой кабель, даже если он никуда не подключён. Это в своё время заставило меня думать, что у меня пульт бракованный и помогла только случайность, когда я после зарядки пульта опять подключил к нему планшет без бокового провода и всё заработало. Датчики препятствий В рекламе идёт упор на то, что дрон со всех сторон увешан сенсорами и ни за что никуда не врежется. По факту все датчики работают только в двух режимах — Active Track и Tripod. В обычном режиме не работают боковые сенсоры, а в спортивном — вообще ни один. Кроме того, в Active Track есть «медленный» и «быстрый» режимы, во втором так же выводится предупреждение, что датчики будут отключены.Несколько скриновОбычный ручной режим полёта (Positioning mode) — работают только передний и задний датчики (на самом деле ещё верхний и нижний, но на такой высоте это не важно).
Датчики препятствий В рекламе идёт упор на то, что дрон со всех сторон увешан сенсорами и ни за что никуда не врежется. По факту все датчики работают только в двух режимах — Active Track и Tripod. В обычном режиме не работают боковые сенсоры, а в спортивном — вообще ни один. Кроме того, в Active Track есть «медленный» и «быстрый» режимы, во втором так же выводится предупреждение, что датчики будут отключены.Несколько скриновОбычный ручной режим полёта (Positioning mode) — работают только передний и задний датчики (на самом деле ещё верхний и нижний, но на такой высоте это не важно). Active Track (медленный) — все датчики работают.
Active Track (медленный) — все датчики работают. Лично у меня в Active Track дрон жёстко тупит на боковых препятствиях, потому что по бокам у него только одна камера, которая определяет наличие препятствия, но не расстояние до него, поэтому пролетая в метре от дерева дрон просто останавливается и жалуется на препятствие сбоку, хотя оно вообще ему никак не мешает. Отдельно стоит упомянуть режим Tripod (штатив). Изначально у первого Мавика и до определённого обновления прошивки у второго, это был режим в котором дрон еле двигается, если пытаться им управлять, но при этом все силы тратит на то, чтобы оставаться неподвижным несмотря на ветер. Отличный режим для фотографий. После обновления в этом режиме теперь можно задавать скорость передвижения по горизонтали, вертикали и поворотов, так что можно использовать его и для съёмки видео. Отдельным бонусом идёт работа всех датчиков.
Лично у меня в Active Track дрон жёстко тупит на боковых препятствиях, потому что по бокам у него только одна камера, которая определяет наличие препятствия, но не расстояние до него, поэтому пролетая в метре от дерева дрон просто останавливается и жалуется на препятствие сбоку, хотя оно вообще ему никак не мешает. Отдельно стоит упомянуть режим Tripod (штатив). Изначально у первого Мавика и до определённого обновления прошивки у второго, это был режим в котором дрон еле двигается, если пытаться им управлять, но при этом все силы тратит на то, чтобы оставаться неподвижным несмотря на ветер. Отличный режим для фотографий. После обновления в этом режиме теперь можно задавать скорость передвижения по горизонтали, вертикали и поворотов, так что можно использовать его и для съёмки видео. Отдельным бонусом идёт работа всех датчиков.
Камера
То, ради чего всё затевалось. Первая проблема с камерой — это пластиковая крышка. Она царапает камеру сверху каждый раз, когда я надеваю и снимаю эту крышку. Решение состоит в том, чтобы наклеить скотч на поверхность, трущуюся о камеру. Если приглядеться — видно две немного расходящиеся полоски. К сожалению, узнал я об этом слишком поздно и товарный вид уже подпорчен.
Решение состоит в том, чтобы наклеить скотч на поверхность, трущуюся о камеру. Если приглядеться — видно две немного расходящиеся полоски. К сожалению, узнал я об этом слишком поздно и товарный вид уже подпорчен.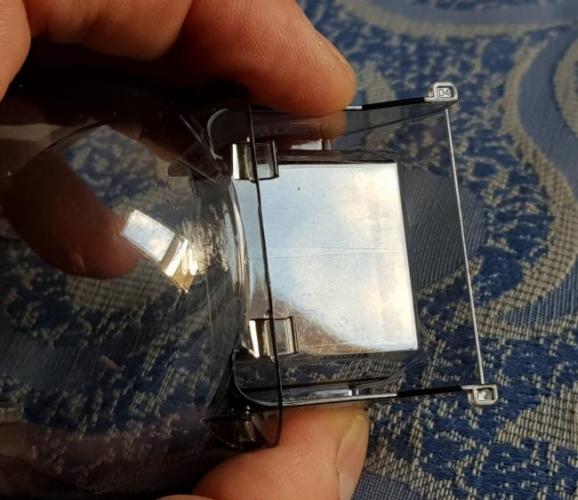 Вторая проблема — непонятные изменения в настройках видео при смене полётных режимов. В обычном режиме есть варианты видео — 2.7K 60fps и 1080p 120fps.Скрины настроек видео
Вторая проблема — непонятные изменения в настройках видео при смене полётных режимов. В обычном режиме есть варианты видео — 2.7K 60fps и 1080p 120fps.Скрины настроек видео




 Решение — поставить галочку «сохранять исходные фотографии» и потом из них можно хоть 4К 120fps сделать, но руками.Настройки
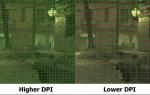
Решение — поставить галочку «сохранять исходные фотографии» и потом из них можно хоть 4К 120fps сделать, но руками.Настройки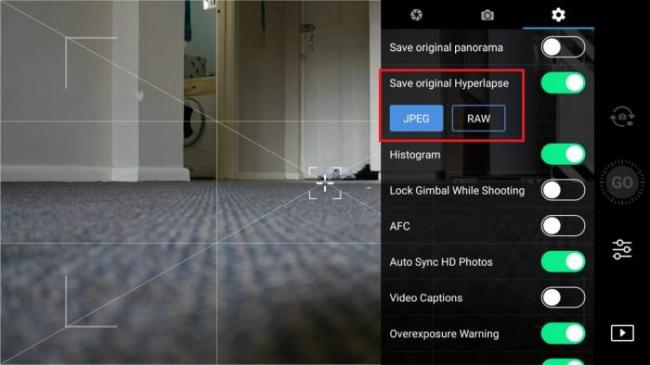 Сама по себе камера, Hasselblad с однодюймовым сенсором, должна была быть бомбой, которая унижает владельцев Phantom 4 Pro, но на Youtube появилось видео от пользователя Cliff Totten с форума Mavicpilots, где он обращает внимание на странную проблему с камерой.Само видео на Youtube на английском Если не хочется смотреть 35 минут — краткая выжимка: В ролике поднимается проблема мутного видео в режиме 4К, которое, по мнению Клиффа, выглядит, как растянутое видео 2.7К. Клифф выдвигает гипотезу о том, что DJI столкнулись с проблемой перегрева сенсора и не смогли обеспечить достаточное охлаждение ему в таком маленьком корпусе. Это, по его мнению, явилось причиной отсрочки презентации The bigger Picture, и так как проблема проявилась почти перед релизом — DJI пошли на хитрость и программно сделали два режима 4К — обычный и HQ. Первый снимает видео 2.7К и растягивает его до 4К, из-за чего проявляется мыло, второй — настоящий 4К, но использует только часть пикселей в середине сенсора, что выглядит, как кропнутое видео с меньшим углом обзора.Официальный ответ DJI на это видео(англ). TL;DR — у нас всё хорошо, вы неправильно тестируете. Я прогнал те же тесты с фотомишенью и не обнаружил этой проблемы у себя (видео по запросу). Возможно, потому что у меня дрон из второй партии, а первая — с проблемой, разлетелась, как горячие пирожки и в Мельбурне через неделю после выхода нельзя было купить Mavic 2 Pro вообще нигде — всё было распродано. Тем не менее, я всё равно не снимаю в 4К, потому что мне не на чем смотреть такое видео и мне больше нравится 60 кадров в секунду, так что 2.7К для меня вполне достаточно. Ночной режим. Это просто нечто.2 Мб фоток ночного Мельбурна
Сама по себе камера, Hasselblad с однодюймовым сенсором, должна была быть бомбой, которая унижает владельцев Phantom 4 Pro, но на Youtube появилось видео от пользователя Cliff Totten с форума Mavicpilots, где он обращает внимание на странную проблему с камерой.Само видео на Youtube на английском Если не хочется смотреть 35 минут — краткая выжимка: В ролике поднимается проблема мутного видео в режиме 4К, которое, по мнению Клиффа, выглядит, как растянутое видео 2.7К. Клифф выдвигает гипотезу о том, что DJI столкнулись с проблемой перегрева сенсора и не смогли обеспечить достаточное охлаждение ему в таком маленьком корпусе. Это, по его мнению, явилось причиной отсрочки презентации The bigger Picture, и так как проблема проявилась почти перед релизом — DJI пошли на хитрость и программно сделали два режима 4К — обычный и HQ. Первый снимает видео 2.7К и растягивает его до 4К, из-за чего проявляется мыло, второй — настоящий 4К, но использует только часть пикселей в середине сенсора, что выглядит, как кропнутое видео с меньшим углом обзора.Официальный ответ DJI на это видео(англ). TL;DR — у нас всё хорошо, вы неправильно тестируете. Я прогнал те же тесты с фотомишенью и не обнаружил этой проблемы у себя (видео по запросу). Возможно, потому что у меня дрон из второй партии, а первая — с проблемой, разлетелась, как горячие пирожки и в Мельбурне через неделю после выхода нельзя было купить Mavic 2 Pro вообще нигде — всё было распродано. Тем не менее, я всё равно не снимаю в 4К, потому что мне не на чем смотреть такое видео и мне больше нравится 60 кадров в секунду, так что 2.7К для меня вполне достаточно. Ночной режим. Это просто нечто.2 Мб фоток ночного Мельбурна










Вывод
В целом я очень доволен и на мой взгляд достоинства Mavic 2 Pro существенно превосходят его недостатки. Но я думаю, что об этих недостатках хорошо знать перед покупкой, а не после. Надеюсь кому-нибудь мой опыт будет полезен.
Правильная настройка камеры – половина успеха в съёмке качественных фото с воздуха. «Прокачанная» техника полёта, конечно, поможет найти нужный ракурс, но без верных настроек, результат будет далёк от ожиданий. Чтобы помочь вам сделать всё правильно, мы собрали 7 наиболее частых ошибок, совершаемых новичками.
1. Режим экспозиции
2. Компенсация яркости
Если вы выбрали правильный режим экспозиции, но изображения всё ещё получаются слишком яркими или слишком тёмными, измените настройки яркости – EV (Exposure Value), чтобы изображение на экране выглядело правильно. Сделать это проще простого: EV+ и изображение станет ярче, EV- – темнее. Идеальные настройки для одного кадра могут абсолютно не подойти для другого. Поэтому, всегда подгоняйте настройки под освещение.
Но учтите, что его нельзя настроить в ручном режиме, так как, это делается через настройку светочувствительности или выдержки.
3. Светочувствительность (ISO)
Если вы не уверены, что сами сможете настроить параметр светочувствительности, попробуйте сделать это автоматически (Auto ISO), тогда камера сама выберет нужные настройки.
4. Баланс белого (White Balance)
Если вам кажется, что изображение выглядит как-то неправильно, попробуйте настроить баланс белого. Разные источники света имеют разные цветовые температуры. Так как, камера не может изменить этот параметр автоматически, вам придётся настроить цвета вручную. Вкратце: добавьте холодным цветам тепла или холода тёплым цветам. Тогда изображение будет больше похоже на то, что вы видите в жизни. Советуем использовать функцию автонастройки, т.к, в большинстве случаев, её вполне достаточно.
 Обзор смартфона ASUS ZenFone Max Pro (M1) ZB602KL
Обзор смартфона ASUS ZenFone Max Pro (M1) ZB602KLКстати, учтите, что изображение в формате RAW можно настроить в фоторедакторе без ухудшения качества картинки. Изображения в формате JPEG, к сожалению, потеряют качество.
5. Фокус
Если изображения получаются размазанными, а нажатие на экран для фокусировки не помогает делу, скорее всего, у вас выбран ручной режим фокусировки – MF (Manual Focus Mode). Чтобы нажатие на экран снова заработало, переключитесь на автоматический режим – AF (Auto Focus Mode). Однако, при тёмном освещении, автофокус может не работать. В таком случае, переключитесь на ручной режим и включите функцию выбора фокуса (Focus Peaking). Она поможет подобрать правильный фокус.
6. Формат
Когда-нибудь замечали, что при постобработке качество изображения ухудшается? Если да, то посмотрите, в каком формате изображение. Продукция фирмы DJI снимает в трёх форматах: JPEG, RAW и JPEG+RAW. Так как, RAW захватывает больше деталей, чем JPEG, рекомендуем использовать именно его, если вы собираетесь редактировать изображение.
7. Режим Съёмки
Получается слишком много кадров, а нужен был только один? Дело в том, что дроны DJI имеют несколько режимов съёмки: Один кадр, Серию Кадров, AEB, HDR, Снимок с задеркжой и др. Убедитесь, что выбран именно один кадр.
Разобраться в настройках камеры может быть не просто, но однозначно, это того стоит. Учитесь на своих ошибках и тогда, вы обязательно повысите свой навык съёмки до невероятных высот.
Используемые источники:
- https://www.newkamikaze.com/articles/105
- https://habr.com/post/446042/
- https://www.djimsk.ru/guides/2018/04/05/7-camera-setting-mistakes-most-beginners-make/


 Как заработать на Ютубе: пошаговая инструкция создания и настройки своего Youtube канала
Как заработать на Ютубе: пошаговая инструкция создания и настройки своего Youtube канала Honor 8 Pro — обзор имиджевого смартфона Huawei
Honor 8 Pro — обзор имиджевого смартфона Huawei Хард ресет на texet. Как сбросить планшет на заводские настройки
Хард ресет на texet. Как сбросить планшет на заводские настройки Adobe Premiere Pro: подробный обзор программы
Adobe Premiere Pro: подробный обзор программы