Содержание
- 1 Что такое ПИД-регулятор в преобразователе частоты?
- 2 Принципы ПИД-регулирования в преобразователях частоты
- 3 Применение преобразователей частоты ACS355 с ПИД-регулятором в водоснабжении
- 4 Преобразователи частоты ABB серии ACS355
- 5 Настройка ПИД-регулятора в преобразователе ACS355
- 6 Блок-схема настройки ПИД-регулятора ПЧ ACS355
- 7 Выводы
- 8 Настраивание ПИД-регулятора общего вида
- 9 Регулятор пропорционального типа
- 10 Регулятор интегрального типа
- 11 Регулятор дифференциального типа
- 12 Работа регулятора в обратном и прямом действии
- 13 Настраивание ПИД-регулятора
- 14 Настраивание датчика на 20 миллиампер ПИД-регулированием
- 15 Пример использования регулирования ПИД
11.07.2017Тематика: Полезная информация
Что такое ПИД-регулятор в преобразователе частоты?
ПИД-регулятор является одним из основных узлов замкнутой системы регулирования: давления, расхода, уровня, скорости, положения, температуры и т.д., и используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимой точности и должного качества переходного процесса регулирования.
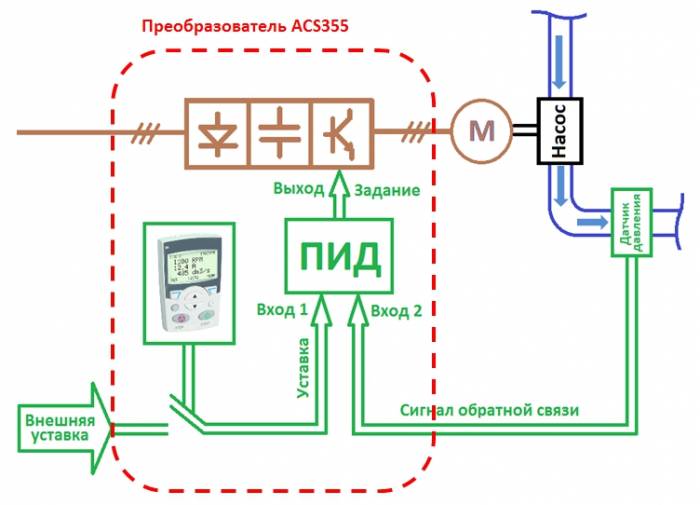
Рис.1. Условная схема ПИД-регулятора в преобразователе частоты ACS355 ABB.
ПИД-регулятор преобразователя частоты условно имеет два входа (см. рис. 1).
На первый вход подается сигнал задания величины параметра технологического процесса, например, необходимая величина давления или температуры. Этот сигнал задания часто называют «уставкой».
На второй вход ПИД-регулятора преобразователя частоты поступает сигнал обратной связи (например, сигнал 4..20mA от пропорционального датчика давления).
В зависимости от величины и знака рассогласования между этими сигналами на выходе ПИД-регулятора, формируется сигнал, который изменяет выходную частоту преобразователя таким образом, чтобы заданное значение технологического параметра (например, давление в трубопроводе) поддерживалось с заданной точностью и с заданным качеством.
Объяснение принципа работы ПИД-регулятора простым языком выглядит следующим образом. Например, необходимо регулировать давление в водопроводе при помощи насоса с преобразователем частоты и пропорционального датчика обратной связи по давлению.
Если давление в водопроводе будет меньшим, чем уставка, то ПИД-регулятор сформирует выходной сигнал для увеличения выходной частоты преобразователя. Это приведёт к увеличению производительности (расхода) насоса и давление в водопроводе начнет увеличиваться.
 Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя
Часть 8. Настройка регуляторов оборотов бесколлекторного двигателяЕсли давление в водопроводе будет больше величины, установленной заданием (уставки), то ПИД-регулятор сформирует управляющий сигнал на уменьшение выходной частоты преобразователя и давление в трубопроводе уменьшится.
Принципы ПИД-регулирования в преобразователях частоты
Выходной сигнал ПИД-регулятора преобразователя частоты представляет собой управляющий сигнал, являющийся суммой трёх слагаемых (составляющих):
- Пропорциональная составляющая (П) — пропорциональна разности входного сигнала и сигнала обратной связи (сигнал рассогласования).
- Интегральная составляющая (И) — интеграл сигнала рассогласования.
- Дифференциальная составляющая (Д) — производная сигнала рассогласования.
Пропорциональная составляющая (П) – это рассогласование между величиной уставки и сигналом обратной связи. При использовании только пропорциональной составляющей всегда будет иметь место статическая ошибка. Например, в замкнутой системе поддержания давления в системе водоснабжения реальное давление будет меньше заданного. Для того, чтобы уменьшить статическую ошибку необходимо увеличить коэффициент усиления П-регулятора (пропорциональной составляющей).
Чрезмерное увеличение коэффициента усиления пропорциональной составляющей ПИД-регулятора преобразователя частоты приводит к автоколебаниям и к неустойчивой работе замкнутой системы регулирования. Поэтому, на практике поступают так: увеличивают коэффициент усиления пропорциональной составляющей (П) до появления автоколебаний, и после этого, уменьшают этот коэффициент на 20 – 30%.
Для устранения статической ошибки изменяют интегральную (И) составляющую ПИД-регулятора. Таким образом, изменяя время интегрирования, получают требуемую точность и качество регулирования.
Дифференциальная составляющая (Д) используется редко – обычно, только в высоко динамичных системах регулирования скорости, положения, синхронизации и т.д.
В целом, для настройки ПИД-регулятора не требуется отличного понимания формальной теории управления системами. При этом использование ПИД-регулятора позволяет решить около 90% всех задач управления простыми системами замкнутого цикла.
Применение преобразователей частоты ACS355 с ПИД-регулятором в водоснабжении
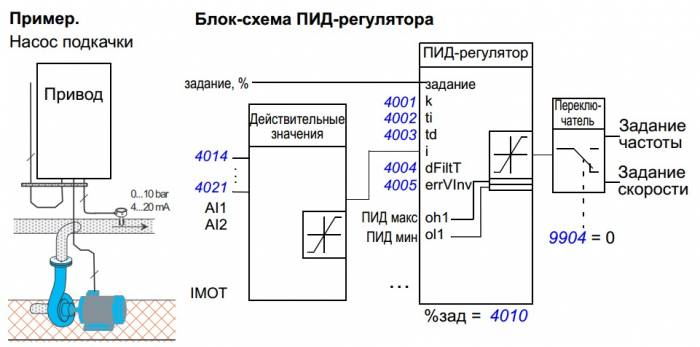
На рис.2 и рис.3 приведены условные блок-схемы систем регулирования давления воды в водоснабжении с использованием преобразователей частоты ABB серии ACS355.

 Как отрегулировать давление воды в вашей квартире
Как отрегулировать давление воды в вашей квартиреРис.2. Условная блок-схема системы регулирования давления воды в водоснабжении.
Преобразователи частоты ABB серии ACS355
Преобразователи частоты ABB серии ACS355 – оптимальный выбор по соотношению «цена-качество» для решения задач с ПИД-регулированием. Общий вид приводов ACS355 показан на рис.4.
Частотные приводы ACS355 обладают широким набором параметров и возможностей. Настроить необходимый режим работы возможно как с панели управления преобразователем, так и при помощи персонального компьютера, посредством специализированного программного обеспечения DriveWindow Light.


Рис.4. Преобразователи частоты ABB серии ACS355 с базовой панелью управления.
В данной статье, для примера, рассмотрен вариант настройки ПИД-регулятора преобразователя ACS355 при помощи панели управления.
Панель управления к частотному приводу ACS355 предлагается в двух вариантах исполнения: базовая панель и интеллектуальная панель управления (см. рис.5).

Рис.5. Варианты панелей управления к преобразователям частоты ABB серии ACS355.
 R13-PROJECT
R13-PROJECTИнтеллектуальная панель управления частотным приводом ACS355 имеет встроенный мастер запуска (настройки) и интерактивную справку. С помощью этих инструментов настройку преобразователя частоты ACS355 на режим ПИД-регулирования можно выполнить без особых временных затрат и не пользуясь руководством по эксплуатации.
При использовании базовой панели управления встроенных удобных инструментов, указанных выше, нет.
Настройка ПИД-регулятора в преобразователе ACS355
Для простоты настройки режима ПИД-регулирования в преобразователе частоты ACS355 (с базовой или интеллектуальной панелью управления) ниже изложен минимально необходимый перечень параметров, на которые необходимо обратить внимание (см. таблицу 1).
Таблица 1: Список параметров для настройки режима ПИД-регулирования в преобразователе частоты ACS355
| Номер и название параметра | Описание функции параметра | Значение параметра | Описание выбранного значения параметра |
| Выбор макроса ПИД-регулятор | |||
| 9902 ПРИКЛ. МАКРОС | Выбирает прикладной макрос | 6 (ПИД-РЕГУЛЯТ) | ПИД-регулирование. Для приложений, в которых привод регулирует параметр технологического процесса. |
| Переходим на внешний 2 (ЦВ1 – автоматический режим) | |||
| 1002 КОМАНДЫ ВНЕШН. 2 | Определяет способ подключения и источник команд пуска, останова и направления вращения для внешнего устройства управления 2 (ВНЕШНИЙ2) | 1 (ЦВХ1) | Команды пуска и останова подаются через цифровой вход 1 (0 = останов, 1= пуск). Направление вращения фиксируется в соответствии с параметром 1003 НАПРАВЛЕНИЕ (установка ВПЕРЕД, НАЗАД= ВПЕРЕД) |
| Управление по каналу Внешний 2 (там есть ПИД) | |||
| 1102 ВЫБОР ВНЕШН. 1/2 | Определяет источник, с которого привод считывает сигнал, выбирается одно из двух внешних устройств управления (ВНЕШНИЙ1 или ВНЕШНИЙ2). | 7 (ВНЕШНИЙ2) | Активно внешнее устройство управления 2. Источники управляющих сигналов определяются параметрами 1002 КОМАНДЫ ВНЕШН. 2 и 1106 ИСТОЧН. ЗАДАНИЯ 2. |
| Выход ПИД1 подключаем в работу | |||
| 1106 ИСТОЧН. ЗАДАНИЯ2 | Выбор источника сигнала для внешнего задания 2 (ЗАДАНИЕ2) | 19 (ВЫХ. ПИД1) | Выход регулятора ПИД1 См. группы параметров 40 ПИД РЕГУЛЯТОР1 и 41 ПИД РЕГУЛЯТОР2 |
| Выбор направления вращения | |||
| 1003 НАПРАВЛЕНИЕ | Разрешает управление направлением вращения двигателя или фиксирует направление | 1 (ВПЕРЕД) | Направление вращения – только вперед |
| Разрешение на запуск привода | |||
| 1601 РАЗРЕШЕНИЕ РАБОТЫ | Выбирает источник внешнего сигнала разрешения работы. | 0 (НЕ ВЫБРАН) | Позволяет запуск привода без внешнего сигнала разрешения работы. |
| Запуск без намагничивания постоянным током | |||
| 2101 РЕЖИМ ПУСКА | Выбор способа пуска двигателя | 1 (АВТОМАТ) | Привод запускает двигатель сразу же с нулевой частоты, если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение СКАЛЯР: ЧАСТ. Если требуется пуск на ходу, выберите ПУСК СКАН. Если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение ВЕКТОР: СКОРОСТЬ или ВЕКТОР: МОМЕНТ, перед пуском привод предварительно намагничивает двигатель постоянным током. Время предварительного намагничивания определяется значением параметра 2103 ВРЕМЯ ПОДМАГНИЧ. См. значение НАМАГН.ПТ. |
| Выбор режима останова | |||
| 2102 РЕЖИМ ОСТАНОВА | Выбор режима останова двигателя | 1 (ВЫБЕГ) | Останов двигателя путем отключения питания. Двигатель вращается по инерции до остановки. |
| Выбираем единицы измерения и формат отображения | |||
| 4006 ЕДИНИЦЫ ИЗМЕР | Выбирает единицу измерения для текущих значений (регулируемой величины) ПИД-регулятора. | 4 (%) | процент |
| 22 (бар) | бар | ||
| 40(куб.м/мин) | кубометр в минуту | ||
| 4007 ПОЛОЖ.ДЕС. ТОЧКИ | Определяет положение десятичной точки для регулируемых ПИД регулятором величин. | 1 | |
| 4008 ЗНАЧЕНИЕ 0% | Вместе с параметром 4009 ЗНАЧЕНИЕ 100 % определяет масштабирование регулируемых ПИД регулятором величин. | ||
| 4009 ЗНАЧЕНИЕ 100% | Вместе с параметром 4008 ЗНАЧЕНИЕ 0% определяет масштабирование регулируемых ПИД-регулятором величин. | ||
| Выбор сигнала уставки | |||
| 4010 ВЫБОР УСТАВКИ | Определяет источник сигнала задания для ПИД-регулятора технологического процесса. | 0 (ПАНЕЛЬ УПРАВ) | Панель управления |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. | ||
| 4011 ВНУТР. УСТАВКА | Выбирает фиксированное значение в качестве задания ПИД-регулятора процесса, когда параметр 4010 ВЫБОР УСТАВКИ установлен на ВНУТРЕННИЙ. | 40 | Значение этого пункта необходимо изменять в случае, когда параметр 4011 равен 19 и устанавливать необходимое для технологического процесса значение. |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. | ||
| 1107 МИН. ЗАДАНИЯ2 | Определяет минимальную величину внешнего задания 2 (ЗАДАНИЕ2). Соответствует минимальной установке для используемого источника сигнала. | 0,00% | |
| 1108 МАКС. ЗАДАНИЯ2 | Определяет максимальную величину внешнего задания2 (ЗАДАНИЕ2). Соответствует максимальной установке для используемого источника сигнала. | 100,00% | |
| Выбор сигнала ОС | |||
| 4016 ВХОД СИГН.1 | Определяет источник действительной величины 1 (СИГН.1). См. также параметр 4018 СИГН.1 МИН | 2 (АВХ2) | Используется аналоговый вход АВХ2 для СИГН.1 |
| Инвертирование сигнала ОС | |||
| 4005 ИНВЕРТ. ОШИБКИ | Выбирается зависимость между сигналом обратной связи и скоростью привода. | 0 (НЕТ) | Прямая зависимость: уменьшение сигнала обратной связи приводит к увеличению скорости привода. Ошибка= Задание- Обратная связь |
| Настройки ПИД-регулятора | |||
| 4001 КОЭФ. УСИЛЕНИЯ | Определяет коэффициент усиления ПИД-регулятора технологического процесса. | 1 | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4002 ВРЕМЯ ИНТЕГРИР | Определяет время интегрирования ПИД-регулятора1 технологического процесса. | 10,0с | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4003 ВРЕМЯ ДИФФЕРЕНЦ | Определяет время дифференцирования ПИД-регулятора технологического процесса. | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. | |
| Параметры управления | |||
| 2202 ВРЕМЯ УСКОР. 1 | Определяет время ускорения1 | 5,0 с | |
| 2203 ВРЕМЯ ЗАМЕДЛ. 1 | Определяет время замедления1 | 5,0 с |
Данный базовый набор параметров позволяет запустить преобразователь частоты ABB серии ACS355 в режиме ПИД-регулирования в общем случае. Изучив руководство по эксплуатации, пользователь может выполнить более тонкую настройку, оптимально подходящую для конкретного применения.
Руководство по эксплуатации на русском языке в печатном виде поставляется вместе с преобразователем частоты ACS355 в одной коробке. Также руководство на русском языке можно скачать в электронном варианте здесь.
Блок-схема настройки ПИД-регулятора ПЧ ACS355
Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) преобразователя частоты ABB серии ACS355 показана на рис.6.
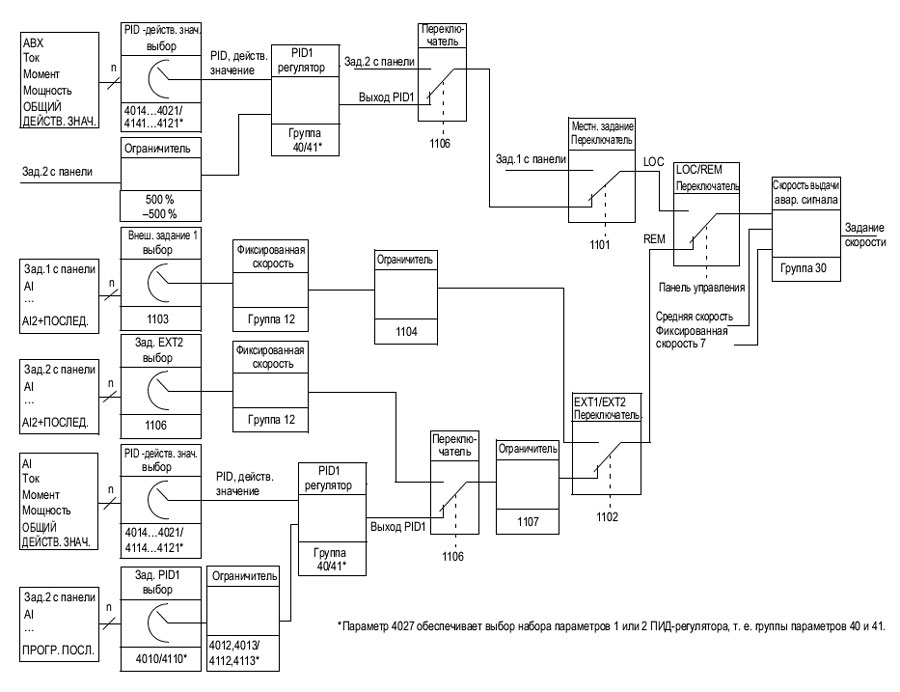
Рис.6. Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) в преобразователях частоты ABB серии ACS355.
На блок-схеме указаны номера параметров и номера групп параметров из руководства по эксплуатации преобразователя частоты.
Выводы
Преобразователи частоты ABB серии ACS355 имеют удобную настройку ПИД-регулятора (мастер запуска) и интерактивную русскоязычную справку. Это позволяет адаптировать преобразователь под широкий спектр задач и быстро ввести привод в эксплуатацию. Возможность настройки преобразователя частоты, как через панель управления, так и при помощи компьютера, добавляет гибкости и удобства в использовании ПЧ ACS355.
предыдущая новость —> архив новостей —> следующая новость →—>
Для процессов системы требуется способность параметров к реагированию на внешнее действие и поддержание системных постоянных величин. Для примера, система насосов с клапанами отвода. Для каждого клапана поддержание потока в постоянном виде обеспечивает постоянное давление в трубах. Помпа в системе приводится в действие приводом, при открывании клапана скорость двигателя увеличивается и снижается при закрытии, чтобы поддерживать давление в трубах на одном уровне.
Настраивание ПИД-регулятора общего вида
Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.
Регулятор пропорционального типа
Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы.

Регулятор интегрального типа
Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием.
Регулятор дифференциального типа
Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе.

Работа регулятора в обратном и прямом действии
Множество регуляторов имеют принцип прямого действия. Повышение скорости двигателя приводит к повышению переменной величины процесса. Это случай в системе насосов, давление это величина переменная процесса. Повышение скорости двигателя обуславливает повышение давления. Во многих системах повышение скорости двигателя обуславливает к снижению параметра переменной процесса. Температура вещества, которое обдувается вентиляционной системой теплообменника – процессная переменная величина: при повышении скорости вентиляционной системы температура вещества снижается. В этом разе нужно применить регулятор действия обратного вида.
Настраивание ПИД-регулятора
Для моторной управляемости системы настраивание ПИД-регулятора бывает сложным процессом. Расскажем, какие шаги для настройки могут сделать проще эту процедуру.
- Определите значение дифференциальной и интегральной равной нулю. Определите наибольшую скорость и контролируйте системную реакцию.
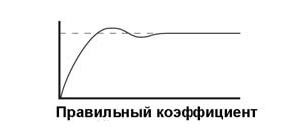
- Повышайте составляющую прямопропорционально и выполните первый пункт. Продолжайте действия до момента начала процесса с автоматическими колебаниями возле точки определения скорости.
- Снижайте пропорциональную величину, пока система не стабилизируется. Волны колебаний начнут затухать.
- Определите пропорциональную величину около 15% меньше этого постоянного пункта.
- Определяйте наибольшую скорость прерывисто, повышайте суммирующую составляющую до начала уменьшения колебаний скорости перед стабильным состоянием системы. Снижайте суммирующую составляющую до достижения системой определенной скорости без ошибки и колебаний.
- Во многих системах настраивание составляющей дифференциального вида не нужно. Если нужно быстродействие системы больше, то можно достигнуть этого путем настройки составляющей дифференциального вида. Устанавливайте скорость по интервалам, повышайте составляющую дифференциального вида, пока не стабилизируется система с наименьшим временем действия (повышайте медленно, избегая состояния нестабильности). Система станет оптимальной при одном перерегулировании.
- Контролируйте стабильность системы, устанавливая значения скорости с интервалами и периодами для гарантированной стабильности системы при плохом исполнении задания.
Настраивание датчика на 20 миллиампер ПИД-регулированием
1. Действия в программном меню
Управляющая панель частотного преобразователя А300 состоит из 3-уровневой структуры:
- Группы опциональных значений (1 уровень).
- Опциональные значения (2 уровень).
- Параметр опционального значения.

2. Настраивание характеристик электромотора и определение направления момента
Установить метод управления частотником в значении Р0-02:
- Р0-02=0 (настройка завода, пульт преобразователя).
- Р0-02=1 (входные команды внешнего управления D1-D7).
Установить характеристики номинального значения электромотора (применяйте параметры с таблички и паспорта электромотора):
- Мощность номинала Р1-01= установите значения.
- Напряжение номинала Р1-02= установите значения (по заводским настройкам 380 вольт).
- Ток номинала Р1-03= установите значения.
- Частота номинала Р1-04= установите значения (по заводским настройкам 50 герц).
- Обороты номинального значения Р1-05= установите значения.
После подсоединения и введения параметров нужно проконтролировать направление вращающего момента электромотора. После отключения меню программы на экране покажется 50 герц, клавишей «вниз» установите наименьшую частоту для задания направления вращающего момента. Для пуска мотора нажмите клавишу «пуск» (параметр Р0-02=0), определите направление момента вращения, затормозите мотор, нажав клавишу «стоп».
Если вращение не совпадает с направлением, то измените две любые фазы питания мотора (замену фаз производить при отключенном частотнике) или поменяйте параметр настройки Р0-09= (0-вперед, 1-назад). Еще раз проконтролируйте момент вращения, нажав клавишу «пуск», если направление момента вращения совпадает, то затормозите мотор, нажав клавишу «стоп». Нажмите клавишу «вверх» и возвратите настроенную частоту 50 герц.
3. Подсоединение датчика (выход на 20 миллиампер)
- Установку производить при выключенном питании частотного преобразователя.
- Напряжение датчика подсоединить к контакту «+24В», сигнал соединить с контактом «AI1», установить перемычку на контакты «COM» и «GND».

Переставить соединение «J1» в состояние «I».
4. Контроль обратной связи
- Подключите напряжение на частотный преобразователь, на экране возникнет подсветка 50 герц.
- Нажмите клавишу «сдвиг» 2 раза.
- На экране будет параметр обратной связи в интервале 0-10 (0-20 мА), зависит от настраиваемого параметра.
Связь обратного вида (4 мА).

- После подтверждения обратной связи нажмите три раза клавишу «сдвиг», появится на экране 50 герц.
- Установите наименьшее значение сигнала входа в величине Р4-13=2.00 (4 мА).
5.Как настраивать значение параметра ПИД-регулирования.
- Установите источник основной частоты Р0-03=8 (частоту определяет ПИД-регулятор).
- Поставьте значение ПИД-регулятора в значение РА-01= результат поддерживаемой величины в процентах (от 0 до 100%) от интервала датчика, РА-01= (результат поддерживаемого параметра/интервал датчика)*100%.
Пример установки значения:
Подсоединен датчик давления на 16 бар с сигналом выхода от 4 до 20 мА. Для давления в 10 бар нужно установить значение
РА-01=(10/16)*100%=62,5%
Произведите тестовый пуск. Проверяйте поддерживаемое значение параметра по приборам, дублирующим измерения (ротаметр, термометр, манометр). Если система регулировки функционирует нестабильно или долгий отклик на замену проверяемого параметра, то применяйте настройки значений РА-05, -06, -07. Эти значения предназначены для точной настройки ПИД-регулятора.
Пример использования регулирования ПИД
Данные
- Механизм вентиляторного управления.
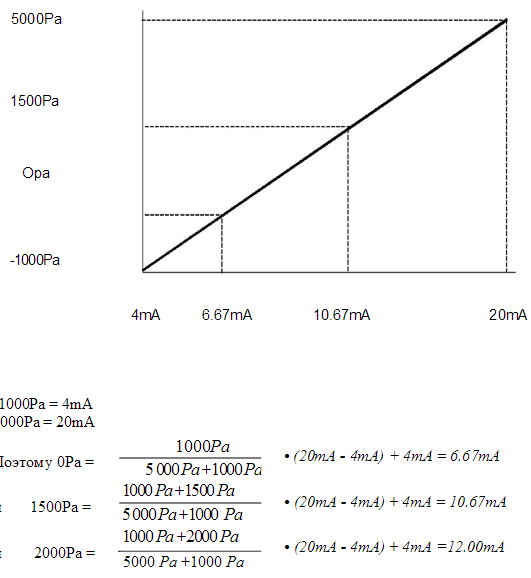
- Характеристика градуировочная датчика давления, интервал 1000-5000 Па, ток 4-20 мА.
- Значение давления 1500 Па.
- Мощность механизма и инерционные данные вентилятора отсутствуют.
Наружные подключения
Датчик обратной связи подсоединен к токовому входу аналогового типа, датчик значения уставки к входу аналогового типа напряжения.
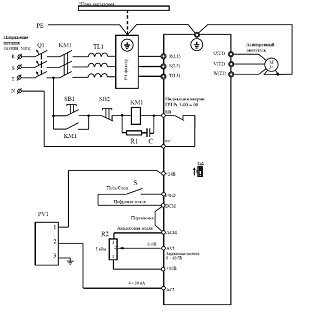
Обратная связь
Датчик связи определен по токовому выходу, входом связи обратного вида применяется токовый вход. Задается РR.10-00=02 (обратная связь с минусом по входу, повышение частоты выхода, повышает давление).
Отградуированная характеристика датчика
Сигнал связи обратного вида в масштабе
Вход связи обратного вида не создает масштаб по усилению и смещению. Применяя параметр PR10-01 можно изменять значение сигнала связи обратного вида в расчетах.
Применение параметра PR10-01 для корректировки значения сигнала связи обратного типа.
Значением PR10-01 можно корректировать значение сигнала связи обратного вида, который применяется в вычислениях. Интервал пропорциональности 0-10, по настройкам завода 1.
Сигнал связи обратного вида повышается в 2 раза перед установкой в ПИД-регулятор. Это равно снижению интервала входа в 2 раза.
Сигнал связи обратного вида снижается в 2 раза перед установкой в регулятор, это эквивалентно увеличению интервала входа в 2 раза. Сейчас интервал ограничен значением датчика.
Пример установки значения параметра PR10-01 (масштаб усиления обратной связи).
Интервал действия датчика:
-1000Ра – 5000Ра.
Наибольшее давление функционирования: 2000Ра.
Применяемая часть интервала работы датчика (закрепленная): -1000Ра-2000Ра.
Это будет равно: 2000Ра –(-1000Ра)
5000Ра –(-1000Ра) = 50%
Если интервал действия не больше 2000Ра с датчиком, то величина параметра
PR10-01 = 1/50%=2
Формула вычисления параметра PR10-01.
Наибольший сигнал датчика: MaxVal
Наименьший сигнал датчика: MinVal
Наибольший нужный сигнал связи обратного вида MaxFBVal
Величина значения ПИД (установленная частота).
Установленную частоту можно изменять операторами наклона и перемещения опции преобразования.
Направление момента вращения установки вентилятора не изменяется, лучше применять AVI вход с заданием значения PR 02-00=01.
PR10-01 (наибольшая частота).
Задать в PR01-00 величину наибольшей частоты механизма вентиляции (PR01-00 = 50 герц).
Наименьшая частота.
Наименьшая частота не оказывает влияния на действие регулировки.
Наклон и перемещение опции преобразования.
Задать PR04-00 AVI перемещение интервала.
PR04-01 AVI полярность.
PR04-02 AVI корректировка наклона.
Вращение производится в одну сторону, PR04-03 = 0 (по заводским настройкам).
Величина уставки.
Для установки величины входа интервал частоты рассчитывается 0-100%.
Установка значения уставки.
При функционировании вентилятора давлению в 1500 Ра равен сигнал датчика 10,67 мА. Величине уставки 1500 Ра равна частота выхода 42%*50 герц = 21 герц и 84%*50 герц = 42 герц.
Можно устанавливать значение в Ра. Если 100% интервала равно 2000 Ра, то при коэффициенте 00-05 = 2000/Fmax = 2000/50 = 40, установленная величина 1500 и задается 1500 Ра.
Интервал частоты выхода.
Верхняя граница частоты выхода при регулировке определяется формулой:
Fmax=Pr01-00хPr10-07.
ПИД-регулирование
Ускорение – замедление.
При взаимодействии с регулированием ПИД нужно время ускорения и замедления устанавливать минимальным для качественной регулировки.
Настраивание регулятора:
- Задать величину I для легкого отклика, без перерегулировки.
- Значение параметра для вентилятора не нужно, из-за замедления процесса.
- Задать другие значения величин.
Советы по настраиванию:
- Повышение Р разгоняет процесс, снижает ошибки.
- При большом Р появляется неустойчивость процесса.
- Снижение величины I ускоряет процесс, делает нестабильным.
- Быстрота дает снижение Р и I.
- Замедление вентилятора определяет большего значения Р.
- Задайте время ускорения и замедления наименьшим.
настройка ПИД регулирование частотного преобразователя<index>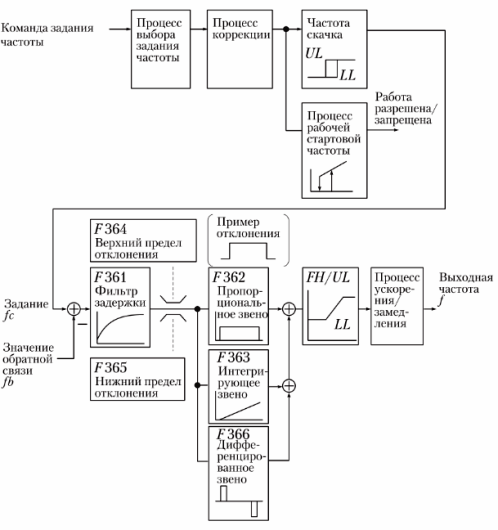
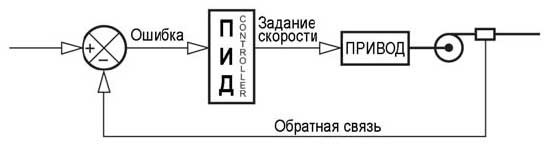
Рис. 1. Блок-схема ПИД-регулирования
Настройка ПИД-регулятора
Производится в соответствии с требованиями управляемой системы, сигналом задания и сигналом обратной связи. Подробно процедура настройки излагается в инструкции по эксплуатации конкретного преобразователя частоты.
Настраиваемые параметры для ПИД-регулирования приведены в табл. 1.
Таблица 1. Настраиваемые параметры ПИД-регулирования
| Название | Диапазон настройки |
| Фильтр задержки | 0 — 255 |
| Коэффициент пропорциональности (П) | 0,01 — 100 |
| Коэффициент интегрирования (И) | 0,01 — 100 |
| Верхний предел отклонения | 0 — 50 |
| Нижний предел отклонения | 0 — 50 |
| Коэффициент дифференцирования (Д) | 0 — 2,55 |
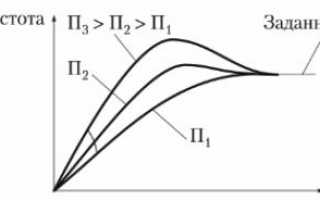
Настройка пропорционального звена

Рис. 2. Настройка пропорционального звена (П-звена) ПИД-регулятора
Настройка интегрирующего звена
Интегрирующее звено (И) сводит к нулю остаточное отклонение после пропорционального звена. Чем больше коэффициент интегрирования, тем меньше остаточное отклонение, но чрезмерное увеличение может вызвать нестабильную работу и колебания (рис. 3).
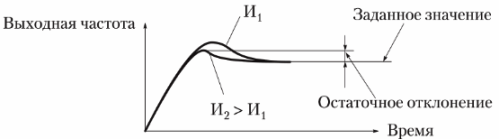
Рис. 3. Настройка интегрирующего звена (И-звена) ПИД-регулятора
Настройка дифференцирующего звена
Дифференцирующее звено (Д) улучшает реакцию системы, когда отклонения быстро меняются. Однако чрезмерное увеличение коэффициента дифференцирования может вызвать колебания выходной частоты.
Настройка фильтра задержки
Фильтр задержки предназначен для сдерживания быстро изменяющихся отклонений (звено запаздывания первого порядка). Если уменьшить задержку, процесс ускорится, и наоборот (рис. 4).
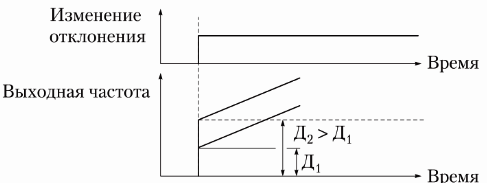
Рис. 4. Настройка фильтра задержки
Настройка сигнала обратной связи

Настройка сигнала задания
Значение задания используется как команда задания частоты, установленная с помощью функции выбора задания скорости. Значение задания частоты задается как значение технологического параметра, к которому будет стремиться значение обратной связи. Задание также может быть установлено с помощью предустановленных скоростей.
</index>Используемые источники:
- http://www.overdrive.by/articles/9/332.html
- http://chistotnik.ru/pid-regulirovanie-v-chastotnyx-preobrazovatelyax.html
- http://electricalschool.info/automation/1741-nastrojjka-pid-reguljatora.html

 Информация Как настроить усилитель
Информация Как настроить усилитель Поиск частоты настройки цифровых каналов DVB-T2
Поиск частоты настройки цифровых каналов DVB-T2 Как настроить сабвуфер Мистери
Как настроить сабвуфер Мистери