Содержание
Программирование регуляторов скорости (ESC)
 Что такое регулятор (контроллер) скорости и для чего он нужен можно почерпнуть из предыдущей статьи про основные элементы радиоуправляемых моделей. А сегодня речь пойдет о типичных настройках регулей и способах их изменения.
Что такое регулятор (контроллер) скорости и для чего он нужен можно почерпнуть из предыдущей статьи про основные элементы радиоуправляемых моделей. А сегодня речь пойдет о типичных настройках регулей и способах их изменения.
Настройки регуляторов скорости
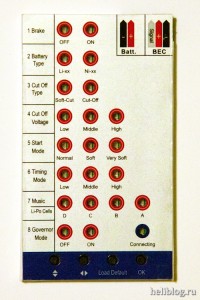
- Brake (тормоз) . Варианты — включен, выключен, иногда также есть «плавный тормоз». При включенном тормозе при убирании газа в ноль регулятор будет принудительно останавливать двигатель, при выключенном — двигатель некоторое время будет продолжать вращаться по инерции.
- Batterry type (тип батареи). Варианты — Li-xx, Ni-xx, иногда Li-Fe. Выбор типа аккумулятора между литиевыми (литий-ионные, литий-полимерные) и никелевыми (никель-металлгидридные, никель-кадмиевые). Данный параметр влияет на пороговые напряжения отсечки.
- Cut off type (тип отсечки). Варианты — Soft-cut, Cutt-off, иногда также Middle-cut. Тип срабатывания отсечки двигателя при падении напряжения питания — жесткая, когда двигатель просто отрубается сразу, либо мягкая, когда он постепенно снижает обороты.
- Cut off voltage (напряжение отсечки). Варианты — Low, Middle, High, либо напрямую напряжение отсечки. Задает порог напряжения при котором происходит отсечка. На этот параметр также влияет выставленный тип аккумуляторов — напряжения отсчки для никелевых аккумуляторов ниже, чем для литиевых. Высокий порог отсечки наименее опасен для аккумулятора, но опасней всего для модели.
- Start mode (режим старта). Варианты — Normal, Soft, Very soft. Режим старта мотора. В нормальном режиме мотор сразу раскручивается на полную мощность, при мягком старте — вносится искусственная задержка. Нормальный режим в основном используется для моторов с пропеллерами, мягкий режим — для моторов вертолетов, чтобы не угробить зубцы на пластиковой шестерне.
- Timing mode (время тайминга). Варианты — Low, Middle, High. Что такое тайминг я описывал в предыдущем посте — это сдвиг фазы подачи напряжения на обмотки, для разных моторов и условий их работы оптимальное значение может различаться. Обычно его выставляют по наибольшей эффективности работы мотора. Как правило моторы с большим количеством магнитных полюсов требуют выставления более высокого тайминга. При изменении этой настройки нужно обязательно проверять работу мотора в стендовых испытаниях, т. к. при неправильном тайминге есть риск получить срыв синхронизации мотора в определенных условиях.
- Music (музыка). У некоторых моделей регуляторов есть возможность выбора нескольких музыкальных мелодий, которые будут проигрываться при включении и самотестировании регулятора. Любопытный нюанс — регуляторы не имеют своего динамика для индикации звуками, они для этой цели используют обмотки подключенного мотора подавая на них переменный ток. Т. е. пищащий регулятор — это на самом деле пищащий мотор. ?
- Li-po cells (количество банок). Обычно эта настройка есть у регуляторов рассчитанных на работу с многобаночными (больше 4) аккумуляторами. Позволяет жестко задать кол-во банок используемого питающего аккумулятора.
- Governor mode (режим говернора). Варианты — включен, выключен. Термин «говернор» пришел к нам из р/у моделей с двигателями внутреннего сгорания, там говернором называют устройство жестко поддерживающее определенные обороты двигателя при заданной ручке газа. Здесь он означает то же самое. Режим говернора обычно используют в CP вертолетах, чтобы двигатель не «проседал» при маневрах.
- PWM (частота PWM). Некоторые регуляторы позволяют задать частоту модуляции управляющего сигнала на двигатель. Выбор обычно между 8 и 16 кГц. Большая частота позволяет более точно и плавно регулировать обороты, но снижает КПД регулятора (в этом режиме он больше греется).
- Reverse (реверс). Некоторые регуляторы позволяют изменить направление вращение мотора программно. Для тех контроллеров, которые этого не умеют, можно сделать это «железно» поменяв местами любые два провода на мотор.
- Current limiting (ограничение тока). Эта настройка также достаточно редка. Она позволяет задать ограничение тока на мотор при котором регулятор отключается.
Это основные настройки. У некоторых специфичных моделей (особенно дорогих), могут быть и другие возможности настроек, которые обычно указываются в инструкции на регулятор.
Способы программирования регуляторов скорости
Вариантов программирования ESC несколько:
- Программирование ручкой газа. Этот вариант не требует никаких дополнительных устройств, но он кошмарно неудобен. Смысл в том, что регулятор присоединяется к приемнику, включается при задранном на 100% газе, при этом он переходит в режим программирования и начинает издавать писки. По количеству писков и по паузам между ними определяется какой параметр сейчас изменяется, а движением ручки газа производятся действия по изменению настроек. В общем, это сродни программированию некоторых древних Российских мини-АТС, которые также программировались по телефону на основе гудков и писков. Честно говоря этот способ настолько заморочен и неудобен, что я даже не стал в нем разбираться, потому что есть способ №2.
- Программирование контроллеров с помощью карты программирования. Это самый простой и наглядный способ, но для него понадобится приобрести специальное устройство — карту программирования. Стоит она недорого: 5-15$. Беда в том, что для разных производителей регуляторов нужны свои карты программирования. Более того, для различных линеек регуляторов от одного производителя порой нужны различные карты программирования. Для хоббикинговских регуляторов нужны соответственно хоббикинговские карты программирования, они же поддерживают регуляторы фирм H-Wing, OEMRC и Turnigy Speed. Для регуляторов фирмы Hobbywing нужна соответствующая карта, она же программирует RCtimer’овские регуляторы. Как правило, все карты программирования имеют индикаторы для показа текущих установок, несколько кнопок для перемещения между настройками и изменения их, а также кнопку для сохранения настроек. Поэтому процесс программирования в данном случае значительно более простой и удобный, чем с помощью ручки газа, поэтому задумайтесь о приобретении карты программирования, если собираетесь настраивать свои ESC.
- Третий способ экзотический — он доступен как правило только для дорогих регуляторов. Это программирование с помощью адаптера USB, или через ИК пульт. В этом случае вместе с устройством идет специальный адаптер (либо он приобретается отдельно), а настройки изменяются с помощью пульта, либо с помощью программы на компьютере. Некоторые регуляторы с программированием через USB имеют весьма продвинутые настройки, например, возможность задать кривую газа непосредственно для регулятора, или загрузить мелодию для проигрывания при старте.
Программирование регулятора с помощью карты программирования
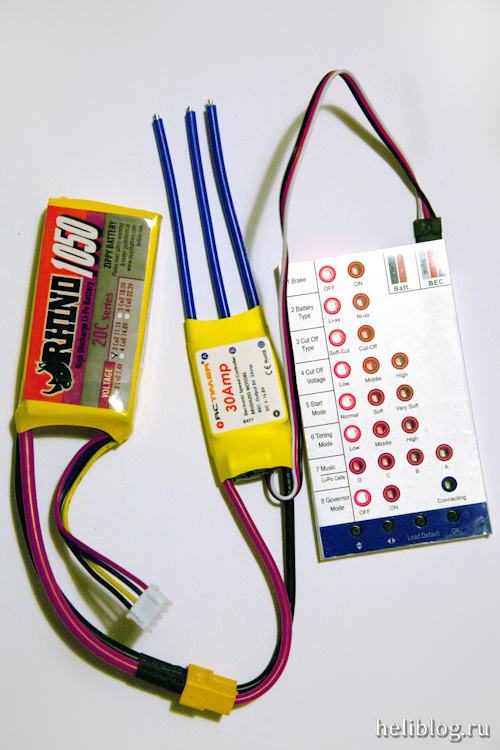
Покажу как программируется регулятор на примере карты для регуляторов Hobbywing, которая также подходит и к регуляторам RCtimer. Для регуляторов со встроенным стабилизатором достаточно просто подключить управляющий шлейф регулятора к разъему «BEC» на карте программирования, затем подключить к регулятору аккумулятор. Через несколько секунд на карте загораются лампочки и показывают текущие настройки.
 Программирование ESC со встроенным BEC
Программирование ESC со встроенным BEC
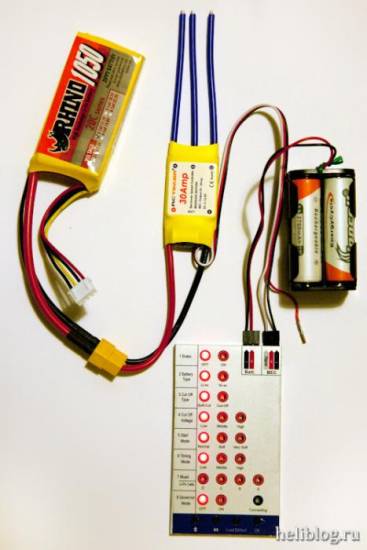
При программировании регуляторов без стабилизатора питания, или с отключенным проводом питания, необходимо подать на карту программирования питание со стороны. Это можно сделать, например, с приемника, или еще откуда-нибудь. Напряжение питания: 5-6 Вольт. Мне показалось удобней всего использовать для этих целей кассету под АА аккумуляторы с разъемом под приемник, вот эту. В остальном процесс ничем не отличается.
 Программирование ESC без стабилизатора питания
Программирование ESC без стабилизатора питания
Ну вот, про программирование ESC написал, теперь можно со спокойной совестью программировать свои 6 регуляторов для квадрика. ?
Похожие записи:
Размещено в ТеорияПерейти к: навигация, поиск
Описание[править]
ESC (Electronic Speed Controller) — дословно «электронный регулятор скорости», позволяющий точно варьировать электрическую мощность, подаваемую на электродвигатель. Также регулятор определяет направление вращения мотора (сам или способ подключения к нему).
 Настройки
НастройкиТакже встречаются названия: регулятор хода, регулятор оборотов, Motor Speed Controller.
Регулятор для электродвигателей представляют собой программируемое устройство, контролирующее все жизненно важные параметры двигателя. Регулятор позволяет не только менять обороты и направление работы мотора, но и обеспечивать в зависимости от необходимости плавный или резкий старт, ограничение по максимальному току, функцию «тормоза» и ряд других тонких настроек двигателя под нужды моделиста. Для программирования регулятора используются специальные программаторы, либо устройства для подключению регулятора к компьютеру, либо в полевых условиях это можно делать с помощью передатчика и специальной перемычки.
Характеристики[править]
- Максимальный ток – указывает, какой ток контроллер мотора может держать продолжительное время, то есть постоянно. Как правило, этот параметр входит в обозначение контроллера (18А, 10А). Иногда указывают величину кратковременного, пикового тока, допустимого в течении нескольких секунд.
- Кратковременный ток — способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
- Максимальное рабочее напряжение — указывается, от какого количества никелевых или литий-полимерных банок можно запитывать регулятор. Для контроллеров с BEC-ом, эта величина может иметь зависимость от расчётного количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы BEC — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется BEC, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний BEC. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
- Максимальные обороты (RPM) — программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 RPM, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 RPM. Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора или контроллера.
- Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix 25A 13 мОм, а сопротивление 30 см провода сечением 1кв.мм – 6 мОм, то есть почти треть потерь приходится на провода.
- Частота импульсов контроллера (PWM Frequency) — как правило, составляет 7-8 КГц. У некоторых контроллеров частоту регулирования можно программировать на другие значения — 16 и 32 КГц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения. Частота импульсов может доходить и до 400 кГц.
- Наличие выключателя — это дополнительное удобство, позволяющее не разбирать каждый раз модель, чтобы добраться до аккумулятора и включить/выключить бортовую аппаратуру. Некоторые производители регуляторов не ставят выключателей на контроллеры, рассчитанные на токи ниже 40А.
- Хорошее решение — электронный выключатель, который работает на размыкание, и если он в полёте случайно оторвется то контроллер и аппаратура останется включенной.
- Внимание! Некоторые регуляторы выключают лишь питание приёмника (встроенный BEC), а контроллер при этом остаётся включенным, не подавая никаких сигналов о разряде аккумулятора, который может постепенно разрядиться «в ноль», что для литиевых аккумуляторов заканчивается фатально.
Подключение[править]
К аккумулятору[править]
Важно! Нельзя делать провода от регулятора до аккумулятора слишком большой длины! Стартовые токи бесколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие скачки тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители экономят на них.
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известны случаи сгорания контроллеров при длине проводов со стороны аккумулятора около 30см.
Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора — контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то следует
- прежде всего увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
- если увеличение длины проводов от аккумулятора до регулятора неизбежно, но следует их заменить на более «толстые» (увеличить поперечное сечение проводов).
К мотору[править]
Мотор подключается к регулятору тремя проводами. Порядок подключения имеет значение только для направления вращения мотора.
К приёмнику/контроллеру[править]
К приёмнику или полётному контроллеру регулятор подключается, как правило, через сервопровод, через который получает сигнал управления и даёт питание для приёмника (полётный контроллер обычно питается от другого источника, поэтому либо используются регуляторы OPTO, либо питающий провод сервопровода не используется (вынимается, отрезается).
Настройки[править]
Практически все современные регуляторы (за исключением контроллеров моторов со специальными прошивками для мультикоптеров) имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором.
 Процесс сваривания полуавтоматическим сварочным аппаратом без газа - обычной проволокой
Процесс сваривания полуавтоматическим сварочным аппаратом без газа - обычной проволокой- Напряжение выключения мотора (cut-off voltage) – при снижении до какого напряжения питания мотор (и только он) будет выключен. Эта функция предназначена для избежания просадок питающего напряжения бортового аккумулятора и, как следствие, сохранения работоспособности аппаратуры при его разряде и для защиты самого аккумулятора от переразряда (последнее особенно важно для литий-полимерных аккумуляторов). Обычно задаётся в количествах «банок». На некоторых контроллерах количество банок литиевых батарей определяется автоматически.
- Тип выключения мотора (cut-off) – как правило имеет 2 значения.
- плавный (soft cut-off): контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
- жёсткий (hard cut-off): если зафиксировано падение напряжения ниже заданного, то мотор немедленно останавливается. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора.
- Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров, а также полезно при использовании на планерах, когда принудительно нужно остановить пропеллер, чтобы он не раскручивался набегающим потоком воздуха. В некоторых контроллерах, тормоз и плавное выключение мотора – установки взаимоисключающие: для включения плавного отключения мотора надо выключить тормоз и наоборот.
- Опережение (Timing) – параметр, от которого зависит мощность и КПД пары мотор+регулятор. Может находится в пределах от 0°..30°. Физически это электрический угол опережения коммутации обмоток. Для двухполюсных моторов при увеличении опережения обороты и мощность на максимальных оборотах растут, а общий КПД падает.
- Для двух и 4-х полюсных моторов с внутренним ротором рекомендуют значения 5°..15°. При больших значениях опережения мощность практически не растет, а КПД падает на 3-5% — это важно для соревнований, где счет идет именно на эти проценты.
- Для многополюсных моторов с внешним ротором ситуация иная — для них оптимальным по КПД и мощности является опережение 25°..30°. При изменении угла опережения от 5° до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%.
- Режим старта (start mode) — не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
- Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.
- Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться, что может критично сказаться на управлении. Не рекомендуется отключать защиту по току, если вы не уверены, что ток мотора не может превысить максимально допустимое значение для контроллера, что может привести к повреждению контроллера.
- Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от положения стика газа. Может иметь значения:
- автокалибровки (auto calibrating) – при этом контроллер самостоятельно определяет положение малого и полного газа
- фиксированный (fixed) — когда характеристика жёстко задана производителем.
- Гувернёр (governor) — настройка предназначена для вертолётов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
- Реверс (reverse) — смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
Как выбрать регулятор?[править]
- Мощность регулятора должна соответствовать мощности мотора. Соответственно максимальный ток, на который рассчитан регулятор, должен быть не меньше максимального тока, на который рассчитан мотор. Обратная разница вполне допустима — рабочий ток определяется нагрузкой (мотором), а не регулятором. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
- Если планируется использовать литий-полимерные аккумуляторы — регулятор должен иметь соответствующие настройки.
- Внимательно изучите все характеристики выбранного регулятора.
Производители регуляторов[править]
Профессиональные[править]
На этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Регуляторы оборотов управляют двигателями по командам полетного контроллера и они тоже сделаны на микроконтроллере и нуждаются в настройке. Еще в статье мы расскажем о калибровке винто-моторной группы.
Подключение для настройки
Есть много способов программирования конфигурации регуляторов оборотов. Самый простой — сделать это в ручную при помощи аппаратуры радиоуправления. Также можно, например, применить для этого специальную карту. Некоторые полетные контроллеры умеют сами выставлять настройки. Мы будем настраивать при помощи пульта. При этом доступны все настройки и не надо никаких дополнительных устройств. У нас стоят регуляторы оборотов HobbyKing 25A BlueSeries. Инструкцию к ним можно скачать здесь. Настройку регуляторов оборота проще всего производить на собранном коптере, когда регуляторы уже подключены к двигателям и подготовлены к подключению аккумулятора. Настройку обязательно производить при снятых пропеллерах! Управляющий провод подключите к третьему канала приемника (канал газа). Все остальное отключите от приемника. При таком подключении приемник питается от встроенного стабилизатора регулятора.
Процесс настройки
Методология настройки следующая. Вам необходимо подать на регулятор одновременно питание и максимальный газ. Через пять секунд регулятор перейдет в режим настройки, о чем просигналит писком двигателя. Затем начнется последовательный перебор пунктов меню, каждому из которых соответствует свой звуковой сигнал. Как только регулятор дошел до нужного параметра, нужно опустить газ в минимум, дождаться звукового подтверждения и выключить питания. Вот как звучит это звуковой меню: Теперь разберемся с тем, какие настройки нужно выставить:
- (_*_*_*_*), Brake, on/off. Тормоз, по дефолту выключен и должен так и остаться. Подробнее об этой настройке чуть позже.
- Battery type, тип батареи
- (~ ~ ~ ~), NiCad
- (~~ ~~ ~~ ~~), LiPo — установлен по умолчанию. Оставить без изменения
Low voltage Cutoff Threshold, порог отключения для защиты батареи от разряда</li>
- (*_ _* *_ _* *_ _* *_ _*), Low 2.8/50%
- (*_ _ _* *_ _ _* *_ _ _* *_ _ _*), Medium 3.0v/60% — установлен по умолчанию. Оставить без изменения
- (*_ _ _ _* *_ _ _ _* *_ _ _ _* *_ _ _ _*), High 3.2v/ 65%
(- — — -), Restore Factory defaults. Сброс к заводским настройкам</li>Timing Setup</li>
- (- — — -), Automatic (7-30) — установлено по умолчанию. Оставить без изменения
- (- — — — —), Low (7-22)
- (— — — —), High (22-30)
Soft Acceleration Start Ups, настройка ограничения ускорения</li>
- (V V V V V V V V), Very Soft
- (V V V V), Soft Acceleration — установлено по умолчанию
- (V V V V V V V V V V V V), Start Acceleration — требуется установить для максимальной быстроты отклика
Governer</li>
- (_*_ _*_ _*_ _*_), Rppm off — установлен по умолчанию, оставить без изменения
- (_**_ _**_ _**_ _**_), Heli first range
- (_***_ _***_ _***_ _***_), Heli second range
(W W W W), Motor rotation, Forward/Reverse. Направление вращения, оставить без изменения</li>Switching Frequency, частота переключения</li>
 Установка ГБО своими руками
Установка ГБО своими руками- (// // // //), 8 kHz — установлена по умолчанию
- (\ \ \ \), 16 kHz — требуется установить для двигателя наружного вращения
Low Voltage Cutoff Type, способ отключения при разряде батареи</li>
- (__-__-__-__-), Reduce Power — установлено по умолчанию. Оставить без изменения
- (-_ -_ -_ -_), Hard Cut Off
Калибровка газа
Для калибровки нужно также включить пульт и установить на максимум газ. Затем подключиться питание регулятора и через 2-3 секунды опустить газ до минимума. Регулятор пропищит о том, что диапазон значений запомнен. При желании можно задать регулировку не от минимального значения, а, например, от середины.
Калибровка винто-моторной группы
Балансир
Суть калибровки сводится к выравниванию весов лопастей. Нужно положить винт с балансиром на параллельные направляющие (мы ставим на губки тисков) и найти более тяжелую лопасть. Для подгонки веса поскребите нерабочую часть лопасти канцелярским ножом. Нужно добиться, чтобы пропеллер мог стоять параллельно земле неподвижно.
Проверка калибровки винта
На форумах советуют откалибровать еще и двигатель. Теоретически, нужно на запущенный двигатель (без винта) посветить лазером и посмотреть на отражение. Если оно размазано, то нужно наклеить кусочек скотча на двигатель. Если биения уменьшились — хорошо, если нет — надо клеить в другом месте. На практике делать это сложно: нужен мощный лазер, темнота и терпение. Да и необходимость в этом довольно сомнительная. Мы этот этап не делали. И в заключении, ссылки на остальные части статей о коптерах:Часть 1. Что такое квадрокоптерЧасть 2. Элементы квадрокоптераЧасть 3. Все об аккумуляторах для квадрокоптеровЧасть 4. Рама квадрокоптераЧасть 5. Подсветка коптераЧасть 6. Подключение элементов квадрокоптераЧасть 7. Настройка пульта Turnigy9x для коптераЧасть 9. Настройка полетного контроллера DJI NAZAЧасть 10. Гиростабилизированный подвес для камеры SJ4000
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.
Метки: ESC, ВМГ, калибровка, настройка, пульт Просмотров: 25683
Используемые источники:
- https://heliblog.ru/teoriya/programmirovanie-regulyatorov-skorosti-esc.html
- https://rcsearch.ru/wiki/регулятор_скорости
- http://www.customelectronics.ru/chast-8-nastroyka-regulyatorov-oborotov-beskollektornogo-dvigatelya/

 Регулировка оборотов холостого хода: инжектор и карбюратор
Регулировка оборотов холостого хода: инжектор и карбюратор Проверка и регулировка оборотов холостого хода двигателя с карбюратором 21073 Солекс
Проверка и регулировка оборотов холостого хода двигателя с карбюратором 21073 Солекс Hearts of Iron IV — Больше никаких лагов!
Hearts of Iron IV — Больше никаких лагов!