Содержание
- 1 Задача настройки
- 2 Настраиваем пропорциональный коэффициент
- 3 Настраиваем дифференциальный коэффициент
- 4 Настраиваем интегральный коэффициент
- 5 Заключение
- 6 Зачем настраивать ПИД-регулятор
- 7 Метод настройки по отклику
- 8 Метод с максимальным коэффициентом усиления
- 9 Общие рекомендации для настроек ПИД-регуляторов
В данной статье приведены основные принципы и правила настройки коэффициентов ПИД-регулятора сточки зрения практического применения. Теоретические основы можно прочитать вот в этой статье.
Для простоты изложения рассмотрим настройку регулятора на примере. Допустим, необходимо поддерживать температуру в помещении с помощью обогревателя, управляемого регулятором. Для измерения текущей температуры используем термопару.
Задача настройки
Настройка регулятора производится с одной единственной целью: подобрать его коэффициенты для данной задачи таким образом, чтобы регулятор поддерживал величину физического параметра на заданном уровне. В нашем примере физическая величина — это температура.
Допустим текущая температура в помещении 10 °С, а мы хотим, чтобы было 25°С. Мы включаем регулятор и он начинает управлять мощностью обогревателя таким образом, чтобы температура достигла требуемого уровня. Посмотрим как это может выглядеть.
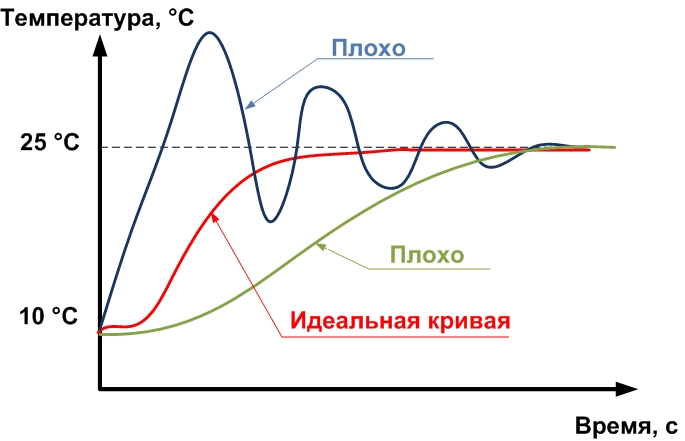
 На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
Чёрным цветом показан график изменения температуры в том случае, если коэффициенты подобраны совсем плохо. Система теряет устойчивость. Регулятор при этом идёт «в разнос» и температура «уходит» от заданного значения.
Рассмотрим более благоприятные случаи.
 На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
А вот и приемлемые кривые:
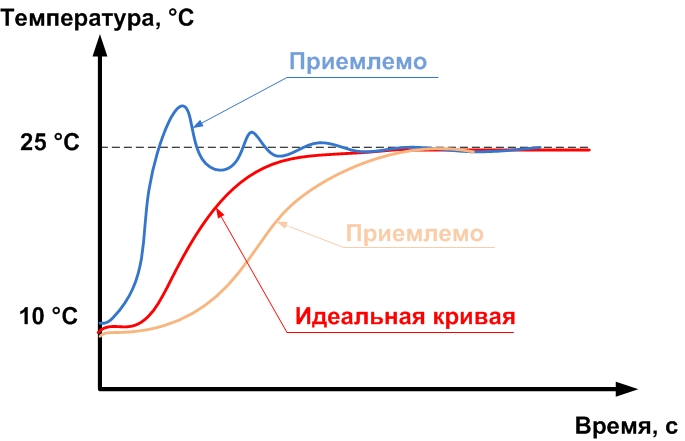 Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
 Преобразователь частоты и пид-регулятор — общая настройка
Преобразователь частоты и пид-регулятор — общая настройкаВ процессе настройки регулятора, пользователю необходимо стремиться получить кривую, близкую к идеальной. Однако, в реальных условиях сделать это не так-то просто — приходится долго и мучительно подбирать коэффициенты. Поэтому зачастую останавливаются на «приемлемой» кривой регулирования. Например, в нашем примере нас могли бы устроить коэффициенты регулятора, при которых заданная температура достигалась бы за 15-20 минут с максимальным перерегулированием (максимальными «скачками» температуры) 2 °С. А вот время достижение уставки более часа и максимальные «скачки» температуры 5 °С — нас бы не устроили.
Далее поговорим о том, как подобрать коэффициенты для достижения оптимального регулирования. Рекомендуется настраивать коэффициенты в том же порядке, в котором это описано.
Настраиваем пропорциональный коэффициент
Выставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие. Пропорциональный коэффициент выставляем в 1.
Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять мощность обогревателя, чтобы достичь заданного значения. Характер изменения можно отследить «визуально», если у вас получится мысленно представить этот график. Либо можно регистрировать в таблицу измеренное значение температуры каждые 5-10 секунд и по полученным значением построить график. Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
 При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраиваем дифференциальный коэффициент
Постепенно увеличивая дифференциальную составляющую, необходимо добиться уменьшения или полного исчезновения «скачков» графика (перерегулирования) перед выходом на уставку. При этом кривая должна стать еще больше похожа на идеальную. Если слишком сильно завысить дифференциальный коэффициент, температура при выходе на уставку будет расти не плавно, а скачками (как показано на рисунке).
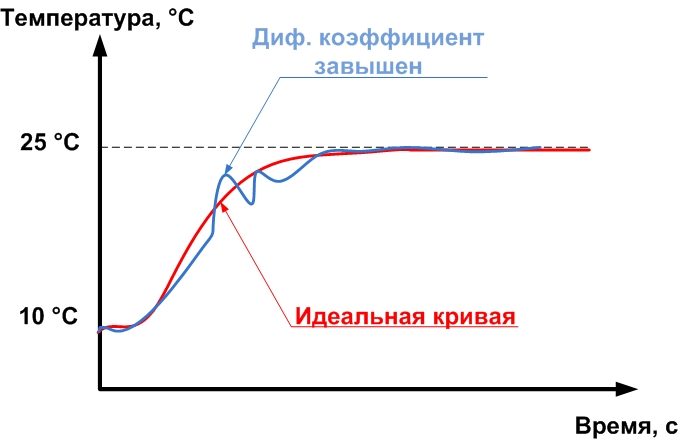
При появлении таких скачков необходимо прекратить увеличение дифференциального коэффициента.
Настраиваем интегральный коэффициент
При настройке двух предыдущих коэффициентов можно получить практически идеальную кривую регулирования или близкую к ней кривую, удовлетворяющую условиям задачи. Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю (см. функцию преобразования ПИД-регулятора). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.
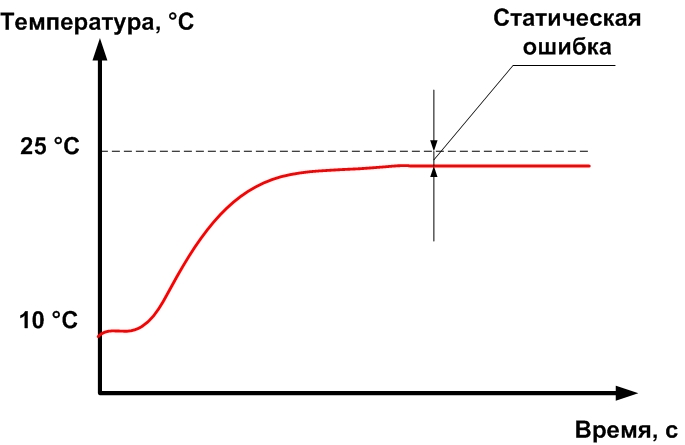
Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
Заключение
Настройка ПИД-регулятора довольно сложный и трудоёмкий процесс. На практике достаточно тяжело достичь оптимального регулирования и зачастую в этом нет необходимости. Чаще всего достаточно добиться такого вида переходного процесса, который устроит пользователя в условиях текущей задачи.
Пид-регуляторы предназначены для того чтобы пропорционально, интегрально и дифференциально управлять различными процессами. Именно так расшифровывается аббревиатура этих устройств. Правильная настройка ПИД-регулятора обеспечивает быстрое достижение требуемых параметров для всей системы. Сигнал поступающий от какого-либо объекта, преобразуется определенным образом в регулирующем устройстве, а затем он возвращается и оказывает воздействие на управление этим объектом.
Содержание
Зачем настраивать ПИД-регулятор
Наиболее характерным примером использования этих приборов являются термосистемы, связанные с изменениями или поддержанием на определенном уровне различной температуры. За счет тонких настроек удается существенно снизить энергетические потери при охлаждении или нагреве. Конкретные модификации ПИД-регуляторов подбираются в соответствии с индивидуальными особенностями той или иной термосистемы.
Необходимость тонких настроек рекомендуется рассматривать на примере работы обогревателя. Этот нагревательный прибор управляется ПИД-регулятором и должен поддерживать заданные температуры. Уровень температуры измеряется и контролируется термопарой. Конечная цель настроек заключается в подборе наиболее оптимального коэффициента, с помощью которого будет поддерживаться заданный температурный режим. На представленных графиках видны попытки увеличения температуры с 10 до 25 градусов. В этом случае возможны различные варианты. Общим для них является подключение регулятора к обогревающей установке, в результате, его работа начнет осуществляться в режиме управляемой мощности, а микроклимат в помещении достигнет нужного уровня.
Идеальная конфигурация температурной кривой обозначена красным цветом (рис. 1). То есть, данный физический параметр плавно движется к заданной отметке за максимально короткий промежуток времени. Оптимальный временной промежуток определяется достаточно сложно, поскольку на него оказывают влияние такие факторы как мощность обогревателя, размеры помещения и т.д. Эта величина определяется экспериментальным путем.
2.
 Регулятор холостого хода: Принцип работы, неисправности, виды регуляторов
Регулятор холостого хода: Принцип работы, неисправности, виды регуляторовТемпературный график черного цвета указывает на неправильный выбор коэффициента при регулировании. Работа системы становится неустойчивой, регулятор функционирует неравномерно, а заданное значение не соблюдается.
В более благоприятных условиях температурные графики все так же далеки от стандартных значений (рис. 2). Черная кривая отображает сильные скачки относительно требуемого значения, а зеленая указывает на плавную, но слишком медленную регулировку.
3.
Выбор необходимых коэффициентов, вычисления и настройка могут производиться с помощью различных методов.
Метод настройки по отклику
Данная методика настройки регулятора предполагает следующий порядок действий:
- Прежде чем настраивать регулятор, он устанавливается в ручной рабочий режим. Затем необходимо дождаться стабилизации процесса и один раз изменить выходной сигнал Х, выведенный на регулировочный клапан. За счет этого можно добиться наиболее приемлемого отклика переменной Y, отвечающей за технологический процесс. Получается настраиваемая величина, влияющая на ход общих настроек.
- После того как получен отклик, выходной параметр сигнала регулятора возвращается в исходное положение. В такое же состояние приходит и переменная технологического процесса. В норме разница между обоими показателями должна быть незначительная. Если же различие слишком существенное, попытку отклика следует повторить.
- Далее устанавливается величина коэффициентов ПИД усиления процесса по формуле Кр = Y/Х, а также временная константа Т и время запаздывания d. Для этого верхний и нижний отклики берутся по усредненным значениям.
- Расчет параметров ПИД-регулятора, в том числе настроечных коэффициентов выполняется по специальной формуле: К = 2Т + d/Кр (2Е + d). По ней вычисляется пропорциональный коэффициент. В свою очередь, постоянная интегрирования определяется по формуле: Ti = Т + d/2, а постоянная дифференцирования – Td = Т/(2Т + d). Здесь Кр является коэффициентом усиления процесса, d – временем запаздывания реакции процесса (мин), Т – временной константой процесса (мин), Е – заданной временной константой замкнутого контура (мин).
- Минимально возможный промежуток времени, в течение которого процесс приводится к заданному, рассчитывается по формулам Кр = Y/Х и Е = Т + d. Чтобы сделать работу регулятора более устойчивой, временную константу Е необходимо увеличить.
Если используются каскадные регуляторы, то вначале следует настроить ведомый регулятор, а затем – ведущий. Разница между временными константами ведущего и ведомого регуляторов довольно существенная. У первого устройства она больше, чем у второго примерно в 5 раз.
Метод с максимальным коэффициентом усиления
В этом случае настройка ПИД-регулятора выполняется в определенной последовательности:
- Устройство переводится в режим ручного функционирования при достаточно стабильном процессе. В этом случае не допускаются резкие отклонения от установленного режима. Постоянная дифференциального процесса Td и пропорциональный коэффициент данного регулятора приводятся в нулевое значение. Постоянная интегрирования Ti, наоборот, выставляется на максимум.
- Исходное положение регулируемого клапана следует запомнить, оно может понадобиться во время настроек. После этого регулятор переключается в автоматический режим.
- Коэффициент пропорциональной зависимости постепенно увеличивается до начала появления колебаний, которые должны иметь постоянную амплитуду. В случае возрастания амплитуды, нужно уменьшить значение пропорционального коэффициента, а при сильных перепадах регулятор переводится в ручной режим.
- После этого выставляется зафиксированное исходное положение клапана, пропорциональный коэффициент уменьшается, а процесс настройки повторяется. В случае появления равномерных колебаний следует замерить их период (tc). Для этого нужно чтобы был отработан один полный цикл. Пропорциональный коэффициент, полученный в результате измерений, будет иметь максимальное значение для этой регулировочной системы (Кmax).
- Коэффициент настройки ПИД-регулятора можно рассчитать на основании Кmax и tc по формулам: пропорциональный коэффициент К = 0,6 Кmax, постоянная интегрирования Ti = 0,5 tc, постоянная дифференцирования Td = 0,12 tc.
Общие рекомендации для настроек ПИД-регуляторов
- Регулируемый клапан должен находиться примерно в среднем положении, иначе регулятор не будет работать.
- Все настройки проводятся в зоне шкалы, которая будет использоваться для работы.
- По завершении настроек проверяется устойчивость работы регулятора в разных режимах. При наличии скачков коэффициент усиления следует уменьшить.
Рекомендуем статьи по теме
Что такое ПИД-регулятор
Регулятор тока
Подключение и настройка УЗМ-51М
Регулятор мощности
Как подключить выключатель с регулятором яркости
Регулятор скорости вентилятора
Все разделы Бегущие строки и светодиодные табло Весной 2013 года компания «Автоматика» открыла новое направление деятельности – производство на заказ бегущих строк и светодиодных табло (далее – табло). Данная статья описывает основные виды производимых нами изделий и раскрывает их возможности.Контрактная сборка от компании АвтоматикаВ статье описываются виды работ, осуществляемых компанией АвтоматикаЭлектронный регистратор Параграф — Прибор с большой буквыСтатья посвящена истории создания прибора Параграф от лица главного разработчикаОтзыв о компании Автоматика от «ООО НПО «Наноплазма»Отзыв компании ООО «НПО «Наноплазма» о сотрудничестве с компанией «Автоматика» Отзыв о Параграфах от компании ПриборикаОтзыв нашего дилера — компании Приборика о приборах ПараграфОтзыв Института электрофизики и электроэнергетики РАН о приборе ПараграфМетодика настройки цифрового ПИД-регулятораСеть приборов, протокол MODBUSВ этой статье описываются основные принципы построения RS485 сети приборов, работающей по протоколу Modbus…Стационарные электронные тахометрыТахометр — прибор для измерения угловой или линейной скорости вращающихся или движущихся частей машин и механизмов…Используемые источники:
- http://lazysmart.ru/osnovy-avtomatiki/nastrojka-pid-regulyatora/
- https://electric-220.ru/news/nastrojka_pid_reguljatora/2018-04-14-1491
- https://automatix.ru/articles/


 Как работает датчик температуры для теплого пола: инструкция, схема, виды, общий обзор от мастера + фото
Как работает датчик температуры для теплого пола: инструкция, схема, виды, общий обзор от мастера + фото Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя
Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя Простой метод сделать так, чтобы при отключении АКБ автомобиля не сбились настройки
Простой метод сделать так, чтобы при отключении АКБ автомобиля не сбились настройки