Содержание
http://pikabu.ru/story/stroim_kvadrokopter_chast_1_detali_39…http://pikabu.ru/story/stroim_kvadrokopter_chast_2_sborka_40…

Резюме по данному контроллеру будет коротким: говно. То ли мне так повезло, то ли действительно ожидать от китайских девайсов стабильной работы — верх наивности, не знаю. Но: постоянно слетает прошивка, прошивается он танцами с бубном: через ПК Mission Planner после очередного заскока прошиваться отказывается, но через MacOS APM Planner почему-то прошивается, а версия прошивки отличается от ПК. И после прошивки через MAC, нормально прошивается через ПК. Далее — разъемы не стандартные, а уменьшенные, приходилось колдовать с проводами. Ну и последним разочарованием был внешний GPS. Установив его разницы вообще никакой не ощутил (установил 100% правильно, ножку на плате контроллера перерезал, что бы включился внешний компас). Его так же куда-то постоянно уносило и как бы я его не калибровал, слушался мой летучий аппарат меня с трудом.

A — канал Aileron — наклоны влево/вправо
Кстати, светодиод на контроллере с usb-входом — ооочень яркий, в темное время суток коптер будет заметен 100%. У меня закреплен так:

В конечном итоге мой летательный аппарат выглядит так:

16
Полетные контроллеры NAZA Lite и NAZA M являются продуктом китайской компании SZ DJI Technology Co., Ltd, которая стала одним из лидеров рынка беспилотных летательных аппаратов. Данный тип контроллеров является любительским и построен по принципу «все в одном». Чаще всего контроллеры Наза используются на любительских сборках классом от 350 до 800.
 В серийных моделях они устанавливаются в квадрокоптеры Phantom. Контроллеры Наза не являются дешевыми, но имеют одни из лучших летных характеристик в своем ценовом диапазоне, а оригинальные модули имеют низкий процент бракованных комплектующих. На сегодняшний день существует несколько версий контроллеров NAZA M: V1, V2 и Lite.
В серийных моделях они устанавливаются в квадрокоптеры Phantom. Контроллеры Наза не являются дешевыми, но имеют одни из лучших летных характеристик в своем ценовом диапазоне, а оригинальные модули имеют низкий процент бракованных комплектующих. На сегодняшний день существует несколько версий контроллеров NAZA M: V1, V2 и Lite.
DJI NAZA M V1
В 2011 г. компания DJI запустила в продажу любительские полетные контроллеры серии NAZA M. Эти автопилотируемые системы имели отличные показатели стабилизации по горизонтали. Благодаря этому начинающие пилоты получили возможность безопасно и легко освоить навыки управления мультикоптером, а профессиональные пользователи получили стабильные и маневренные модели.
 Основными достоинствами контроллеров Наза стали:
Основными достоинствами контроллеров Наза стали:
 Руководство для начинающих по Osmo Mobile 3
Руководство для начинающих по Osmo Mobile 3- Поддержка всех типов 4 и 6 роторных платформ: Quad-rotor I4, X4 / Hex-rotor I6, X6, IY6, Y6.
- Наличие встроенных гироскопа, акселерометра и барометра. В совокупности они обеспечивают точное удержание позиции даже при плохих полетных условиях. В модуле установлена внутренняя система демпфирования. Благодаря такой конструкции обеспечиваются высокая надежность и малый вес модуля (25 г).
- Функции интеллектуального контроля (IOC). Course Lock позволяет зафиксировать положение коптера и назначить стороны перемещения независимо от его физической ориентации (направление курсового полета может отличаться от направления носа). Home Lock позволяет зафиксировать точку взлета и упростить возвращение дрона (при использовании GPS модуля). При включении этой функции управление объектом изменится на радиальное. При переводе стика в положение «назад» коптер полетит к месту взлета независимо от направления его носа. Перемещения влево и вправо будут происходить вокруг точки взлета.
- Встроенная функция Failsafe mode. При потере сигнала от передатчика дрон автоматически вернется в точку взлета и совершит посадку (при использовании GPS модуля).
- Двухуровневая защита от низкого напряжения батареи. Модуль питания постоянно получает информацию об уровне заряда батареи. При существенном разряде через диодный модуль подается визуальный сигнал. При критическом разряде автоматически включается функция «Go Home» и летательный аппарат возвращается в точку взлета, а затем совершает автономную посадку.
- Встроенная защита от самопроизвольного запуска моторов.
- Функция автоматического отключения двигателей после посадки или при достижении угла наклона 70° в режиме Atti.
- Возможность дистанционной настройки модуля во время полета.
- Функция управления стабилизирующим подвесом для камеры.
- Возможность использования модуля при температурах от -10°С до +50°С.
- При использовании GPS модуля точность позиционирования составляет: 2,5 м по горизонтали и 0,8 м по вертикали.
 Контроллеры первого поколения имеют 2 режима управления: Atti.Mode и Manual.
Контроллеры первого поколения имеют 2 режима управления: Atti.Mode и Manual.
В первом режиме автономные системы стабилизации помогают в управлении дроном. Максимальная угловая скорость остается неизменной (200°/с). Обеспечивается высокая маневренность и стабильность. Максимальный наклон коптера ограничен 45°, есть фиксация по высоте.
 Этот режим использует систему защиты от разряда батареи и позволяет отпустить стики для зависания дрона. Режим Atti позволяет выполнять развороты и плавные пролеты по горизонтали. В ручном режиме нет никаких ограничений, стабильность летательного аппарата зависит от уровня навыков пилота. В этом режиме не рекомендуется отпускать стики, т.к. дрон может легко потерять баланс.
Этот режим использует систему защиты от разряда батареи и позволяет отпустить стики для зависания дрона. Режим Atti позволяет выполнять развороты и плавные пролеты по горизонтали. В ручном режиме нет никаких ограничений, стабильность летательного аппарата зависит от уровня навыков пилота. В этом режиме не рекомендуется отпускать стики, т.к. дрон может легко потерять баланс.
При должном уровне навыков пилотирования ручной режим позволяет двигаться в перевернутом состоянии и выполнять различные виражи (флипы, роллы).
Комплектация полетного контроллера NAZA M:
- главный контроллер;
- модуль питания с LED индикацией (2s-6s);
- USB кабель для прошивки;
- комплект крепежа и проводов;
- Опционально поставляется модуль GPS.
С выходом новой, второй версии полетного контроллера, NAZA M был снят с производства, а на его основе создана Lite версия. Но для расширения функций присутствует возможность подключения модуля NAZA V2-PMU, который позволяет использовать дополнительное оборудование компании DJI.
DJI NAZA M Lite
Полетный контроллер начального уровня NAZA M Lite разработан на базе первой версии. Благодаря этому он обеспечивает высокую точность выполнения команд пилота и стабилен в воздухе.
Полетный контроллер NAZA M Lite рассчитан на начинающих пользователей, которые не имеют мастерских навыков пилотирования. Главное отличие от первой версии — это отсутствие возможности использования NAZAV2-PMU, IOSD, Zenmuse H3-2D, NAZA OSD, BT и др. При этом он сохранил такой же комфорт в управлении и стабильность при полете.
Был добавлен третий режим управления GPS Attitude. Он позволяет блокировать позицию по координатам GPS, точно удерживать высоту, использовать продвинутую защиту Fail-Safe и работать с применением автопилота. При потере сигнала GPS на 3 секунды происходит автоматическая смена режима на Atti.Mode.
 DJI Mavic Mini руководство по подключению и активированию дрона
DJI Mavic Mini руководство по подключению и активированию дронаБазовые настройки лайта позволяют использовать его на дроне сразу после вскрытия упаковки, без предварительного программирования. Потребуется только настроить конфигурацию мультикоптера и выполнить калибровку.
Комплектация осталась без изменений, но модуль питания был разделен с модулем светодиодов, что позволило более удобно разместить их на модели. Модуль DJI NAZA M Lite GPS остался опциональным.
DJI NAZA M V2
На смену первой версии DJI выпустила NAZA V2. Новый контроллер стал более стабильным и получил ряд новых функций:
- Независимый модуль PMU, позволяющий использовать большое количество дополнительного оборудования производства DJI: H3-2D, H3-3D or H4-3D gimbal, BTU module, iOSD mini and iOSD Mark II, 2.4G Bluetooth Datalink & iPad Ground Station, CAN-Bus NAZA PMU V2, DJI CAN HUB. NAZAPMU V2 создает собственную бортовую сеть и выступает в роли фильтра от помех, которые создают ESC и моторы.
- Возможна установка контроллера на октокоптеры: Octo-rotor I8, X8, V8.
- Режим автопилотирования с возможностью построения маршрута из 16 точек по координатам GPS. DJI Ground Station 2.4 ГГц упростит данную процедуру до минимума и позволит насладиться наблюдением или сосредоточиться на другой задаче.
- Расширенные возможности Failsafe mode. При потере сигнала коптер вернется в точку потери связи. Если в течение 5 секунд сигнал не восстановится, контроллер направит коптер в точку взлета, совершит автономную посадку и выключит моторы. При возобновлении сигнала процедуру автоматического возврата можно прервать и вернуть контроль над летательным аппаратом.
- При использовании гексокоптеров и октокоптеров, в случае отказа одного из двигателей, Наза второго поколения сможет стабилизировать летательный аппарат и продолжить полет. В таком случае поможет функция Home Lock. Благодаря этому вы сможете вернуть дрон и произвести ремонт.
- Новое программное обеспечение позволяет использовать 2 новых способа взлета: с наклонной поверхности или с рук. Сразу после взлета контроллер выравнивает полетную платформу.
По сравнению с первой Назой значительно увеличилась точность позиционирования и зависания. Вертикальный взлет стал стабильнее, а обороты моторов при взлете и зависании снизились. Заметна ощутимая разница в управлении моделью, оно стало более отзывчивым.
Комплектация второй версии Наза отличается от первой и лайта. В стандартную комплектацию входит модуль GPS со встроенным компасом, блок BEC был заменен на PMU (2S-6S) и отдельный модуль LED. Все модули получили ярко-оранжевую окраску. Масса полного комплекта не превышает 150 г.
NAZA V2 имеет 3 режима полета:
- с автоматической стабилизацией и использованием GPS;
- с автоматической стабилизацией без использования GPS;
- ручной режим.
Любой режим можно выбрать перед взлетом или во время полета.
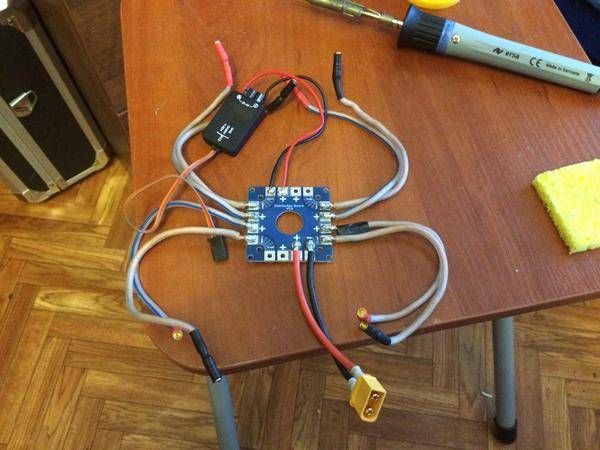
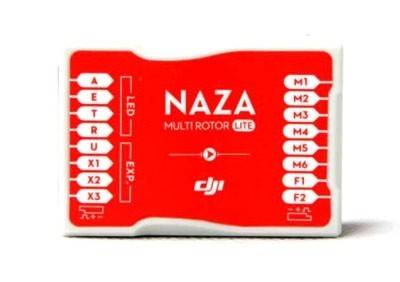
Подключение контроллера NAZA M
Распиновка портов позволяет быстро и безошибочно подключить все модули к контроллеру. Порты главного контроллера:
- A, E, T, R используются для подключения R/C приемника и обеспечивают управление направлением движения дрона.
- X (1,2,3) предназначены для подключения дополнительного тюнинга и D-Bus (S-Bus).
- К LED подключается модуль светодиодной индикации.
- К EXP подсоединяется модуль PMU (BEC).
- M1-M6 предназначены для подключения ESC и моторов. Рекомендуется использовать ESC 400 Hz. Подключение к портам осуществляется согласно схеме в ПО.
- F1 и F2 используются для управления подвесом (при установке контроллера на октокоптер служат для подключения 7 и 8 моторов).
Модуль PMU содержит порт для подключения GPS модуля и дополнительный порт CAN. Если на дроне используется BEC, то модуль GPS подсоединяется к порту EXP главного контроллера.
 Обзор квадрокоптера DJI Phantom 4 Pro – Инструкция пользователя и интересные особенности гаджета
Обзор квадрокоптера DJI Phantom 4 Pro – Инструкция пользователя и интересные особенности гаджетаПрограммирование контроллеров DJI NAZA M
Алгоритм прошивки контроллеров Наза аналогичный для всех версий, но программное обеспечение различается. Для корректной работы контроллера необходимо использовать только соответствующее ПО.
Прошивка Назы М осуществляется при помощи Naza-M Assistant Software. Для настройки NAZA M Lite используется Naza-M Lite Assistant Software. Для перепрошивки Назы 2 применяется Naza-M v2 Assistant Software. Доступные платформы — Windows XP/7 и Mac OS X.
Чтобы каждый пользователь с легкостью настраивал контроллер, ПО содержит руководство для базовой сборки. Для детальной настройки необходимо приобрести дополнительные инструкции для ПО-помощника.
Infocopter.ru
 Начало / Общение клиентов / Обмен опытом / Настройка коптера на NAZA M-Lite
Начало / Общение клиентов / Обмен опытом / Настройка коптера на NAZA M-Lite
-
 #30 Май, 2014 16:56
#30 Май, 2014 16:56Прошу помощи по настройке.Имею такой набор: передатчик ВЧ-модуль c приемником: комплект DJI F450 ARF KIT + Naza-M Lite + GPS Combo: аккум для коптера: Все собрал, передающий модуль и приемник связал, на приемнике зеленый светодиод горит, в программе Assistant выбрал тип коптера, откалибровал стики, указал расстояния для модуля GPS и т.п.Каналы NAZA подключены к приемнику так:A — 1E — 2T — 3R — 4U — 5В меню MIXER так их и прописал.На данный момент проблема такая: включаю пульт, затем включаю коптер, на приемнике загорается зеленый и горит непрерывно, а на BEC-е часто мигает желтый. Двигатели, соответственно, не запускаются. Я так понимаю, не настроен 3-позиционный переключатель, но как его настроить не могу разобраться, по ссылкам, что и тут давали и в интернете нарыл, именно по 9XR не нашел…Заранее благодарен за помощь! Отредактировано30 Май, 2014 17:05 -
#30 Май, 2014 20:03
Вроде разобрался, настроил 3-позиционный переключатель и моторы запустились.Калибровка регуляторов не потребовалась.В MIXER настроил так, как на фото.Мне непонятно только, какое значение нужно выставлять в 5-м канале для Source? (у меня FULL и HALF выставлены практически наугад, чтобы посинели GPS, Attitude и Fail-Safe, подгонял значением Weight).Так правильно? Вложение: WP_20140530_001.jpg (2.08Mb) -
#01 Июн, 2014 19:10
Сегодня я выполнил первые полеты!!!!!!!!!!!Доволен как слон!!!Компас откалибровался на раз! В точке висит очень стабильно!Пока пробовал летать только в режиме GPS.Но есть вопросы:1. Перед стартом часто поморгал зеленым, далее медленные равномерные зеленые вспышки, после этого выполняем взлет.В полете почему-то мигает-мигает равномерно зеленым, потом раз — тройные зеленые вспышки, потом опять равномерные зеленые вспышки. Что это значит? Периодически теряет спутники? Или что это? На полете вроде никак не сказывается…2. На аккуме 5000 mAh летает 22-24 минуты. Нормально? Отредактировано01 Июн, 2014 19:11 -
#02 Июн, 2014 13:47
-
#02 Июн, 2014 17:28
Тебе здесь никто не поможет, я тоже очень долго ждал помощи от кого то но так никто и не отвечал, приходится полагаться на себя, попробуй на других форумах поспрашивай, у меня тоже очень много вопросов возникает про палётный контроллер NAZA M-Lite сейчас что меня интересует это функция failsafe, коптер не возвращается на место взлёта, а приземляется в том месте где был включен мной failsafe. А по поводу твоего вопроса я даже и не знаю что и сказать, я на своём коптере такого не замечал а может не обращал внимание во время палёта не видно индикацию, у меня тройные вспышки один раз, я как понял читая форумы это NAZA записывает место взлёта чтобы потом при включении failsafe коптер приземлился в эту точку, но у меня этого не происходит((( -
#02 Июн, 2014 18:38
rashit , спасибо за то, что обратил внимание на мои вопросы!Ты случайно не из Новосибирска?Что ж, попробую на других форумах поспрашивать…я пока Fail-Safe не пробовал -
#02 Июн, 2014 18:54
Я из Киселёвска, Кемеровская область можно сказать рядом живём) Вот ссылочка попробуй здесь найти ответ: http://www.dji-club.ru/index.php/forum/1-dobro-pozhalovat-klub-liubitelei-kopterov-dji/Отредактировано02 Июн, 2014 19:02 -
#05 Июн, 2014 09:00
rashit, спасибо за ссылкуя, скорее всего, в июне поеду в Кемерово к тёще, можно словитьсямой номер +7-913-465-8317, Сергей, если что, пиши в WhatsApp, или электронка drivesound@mail.ruОтредактировано05 Июн, 2014 09:00 -
#08 Июн, 2014 10:27
-
#09 Июн, 2014 10:00
Сергей, не могли бы вы мне помочь настроить Курс-Лок и Хоум-Лок на моей аппе FlySky 9x аналог Turnigy 9x я долго ищю всевозможную информацию, но не могу найти как запрограмировать определённый тумблер для Курс-Лок и Хоум-Лок и на какой канал нужно подключить NAZA к приёмнику, трёх позиционный тумблер я настроил GPS, Attitab, Manual и Fail-Safe понял как а вот с этим всю голову поломал, помогите пожалуйста!
 #
# #
#Используемые источники:
- https://pikabu.ru/story/dji_naza_m_lite__gps_mini_obzor_4330436
- https://infocopter.ru/osobennosti-naza-lite-i-naza-m/
- http://www.parkflyer.ru/forum/topic/13170/


 Обзор нового ручного стабилизатора DJI Osmo Mobile 3
Обзор нового ручного стабилизатора DJI Osmo Mobile 3 Ультимативное руководство по DJI GO 4: главный экран и настройки камеры
Ультимативное руководство по DJI GO 4: главный экран и настройки камеры Обзор «облегченного» флагмана Huawei Mate 20 Lite, примеры фото на камеру
Обзор «облегченного» флагмана Huawei Mate 20 Lite, примеры фото на камеру