Содержание
- 1 Таблица выбора приводов.
- 2 Инструкция.
- 3 Что такое ПИД-регулятор в преобразователе частоты?
- 4 Принципы ПИД-регулирования в преобразователях частоты
- 5 Применение преобразователей частоты ACS355 с ПИД-регулятором в водоснабжении
- 6 Преобразователи частоты ABB серии ACS355
- 7 Настройка ПИД-регулятора в преобразователе ACS355
- 8 Блок-схема настройки ПИД-регулятора ПЧ ACS355
- 9 Выводы
- 10 Коды ошибок частотника ABB ACS 400 сигнализирующие о неисправности и аварии
- 11 Информационные сообщения и коды ошибок частотного преобразователя ABB ACS 400
Преобразователи частоты ABB разработаны шведско-швейцарской компанией Asea Brown Boveri Ltd. Это высоковольтные преобразователи для привода различного типа устройств.
Таблица выбора приводов.
| Тип приводного устройства | Наименование серии |
| Низковольтный преобразователь частоты | ACS55, ACS150, ACS310, ACS550, ACS580, ACS355, ACS850, ACSM1, ACH550, ACS320, ACQ810, ACS880-01, ACS880 мультидрайв, ACS800, ACS800 мультидрайв |
| Высоковольтный преобразователь частоты | ACS 1000, ACS 2000, ACS 5000, ACS 6000, MEGADRIVE-LCI |
| Низковольтное устройство плавного пуска | PSR, PSE, PSTX, PSTB |
| Высоковольтное устройство плавного пуска | SSM |
Инструкция.
- Проверка комплектности перед началом установки.
- Осмотреть комплектующие на предмет повреждений продукта.
- Проверить паспортные данные на соответствие вашим требованиям.
- Проверить оборудование, дополнительные модули.
- Сравнить данные из спецификации с вашими.
- Проверить размеры оборудования.
- Установка и проверка.
- Подключить источник питания согласно спецификации.
- Проверить предохранительный тормоз на преодоление мгновенного электрического тока и пробивание изоляции при запуске.
- Установите инвертор в вентилируемом помещении с установленными условиями вентиляции.
- Помещение для инвертора должно соответствовать по размерам его мощности.
- В коробе для инвертора должны быть нормальные условия вентиляции.
- Проверьте комплектацию инвертора. Она должна соответствовать спецификации. Иначе может произойти повреждение инвертора или сокращение срока его службы.
- Проверьте чистоту среды, окружающей пространство инвертора: влажность воздуха, вентиляцию, температуру воздуха.
- Эксплуатация инвертора должна производиться профессиональными операторами, имеющими навык работы с частотными преобразователями.
11.07.2017Тематика: Полезная информация
Что такое ПИД-регулятор в преобразователе частоты?
ПИД-регулятор является одним из основных узлов замкнутой системы регулирования: давления, расхода, уровня, скорости, положения, температуры и т.д., и используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимой точности и должного качества переходного процесса регулирования.
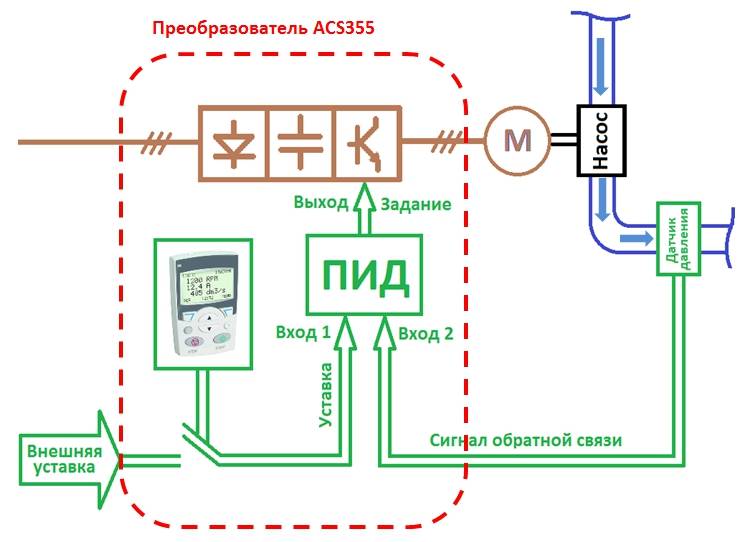
Рис.1. Условная схема ПИД-регулятора в преобразователе частоты ACS355 ABB.
ПИД-регулятор преобразователя частоты условно имеет два входа (см. рис. 1).
На первый вход подается сигнал задания величины параметра технологического процесса, например, необходимая величина давления или температуры. Этот сигнал задания часто называют «уставкой».
На второй вход ПИД-регулятора преобразователя частоты поступает сигнал обратной связи (например, сигнал 4..20mA от пропорционального датчика давления).
В зависимости от величины и знака рассогласования между этими сигналами на выходе ПИД-регулятора, формируется сигнал, который изменяет выходную частоту преобразователя таким образом, чтобы заданное значение технологического параметра (например, давление в трубопроводе) поддерживалось с заданной точностью и с заданным качеством.
Объяснение принципа работы ПИД-регулятора простым языком выглядит следующим образом. Например, необходимо регулировать давление в водопроводе при помощи насоса с преобразователем частоты и пропорционального датчика обратной связи по давлению.
 Преобразователь частоты и пид-регулятор — общая настройка
Преобразователь частоты и пид-регулятор — общая настройкаЕсли давление в водопроводе будет меньшим, чем уставка, то ПИД-регулятор сформирует выходной сигнал для увеличения выходной частоты преобразователя. Это приведёт к увеличению производительности (расхода) насоса и давление в водопроводе начнет увеличиваться.
Если давление в водопроводе будет больше величины, установленной заданием (уставки), то ПИД-регулятор сформирует управляющий сигнал на уменьшение выходной частоты преобразователя и давление в трубопроводе уменьшится.
Принципы ПИД-регулирования в преобразователях частоты
Выходной сигнал ПИД-регулятора преобразователя частоты представляет собой управляющий сигнал, являющийся суммой трёх слагаемых (составляющих):
- Пропорциональная составляющая (П) — пропорциональна разности входного сигнала и сигнала обратной связи (сигнал рассогласования).
- Интегральная составляющая (И) — интеграл сигнала рассогласования.
- Дифференциальная составляющая (Д) — производная сигнала рассогласования.
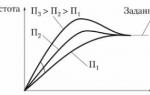
Пропорциональная составляющая (П) – это рассогласование между величиной уставки и сигналом обратной связи. При использовании только пропорциональной составляющей всегда будет иметь место статическая ошибка. Например, в замкнутой системе поддержания давления в системе водоснабжения реальное давление будет меньше заданного. Для того, чтобы уменьшить статическую ошибку необходимо увеличить коэффициент усиления П-регулятора (пропорциональной составляющей).
Чрезмерное увеличение коэффициента усиления пропорциональной составляющей ПИД-регулятора преобразователя частоты приводит к автоколебаниям и к неустойчивой работе замкнутой системы регулирования. Поэтому, на практике поступают так: увеличивают коэффициент усиления пропорциональной составляющей (П) до появления автоколебаний, и после этого, уменьшают этот коэффициент на 20 – 30%.
Для устранения статической ошибки изменяют интегральную (И) составляющую ПИД-регулятора. Таким образом, изменяя время интегрирования, получают требуемую точность и качество регулирования.
Дифференциальная составляющая (Д) используется редко – обычно, только в высоко динамичных системах регулирования скорости, положения, синхронизации и т.д.
В целом, для настройки ПИД-регулятора не требуется отличного понимания формальной теории управления системами. При этом использование ПИД-регулятора позволяет решить около 90% всех задач управления простыми системами замкнутого цикла.
Применение преобразователей частоты ACS355 с ПИД-регулятором в водоснабжении
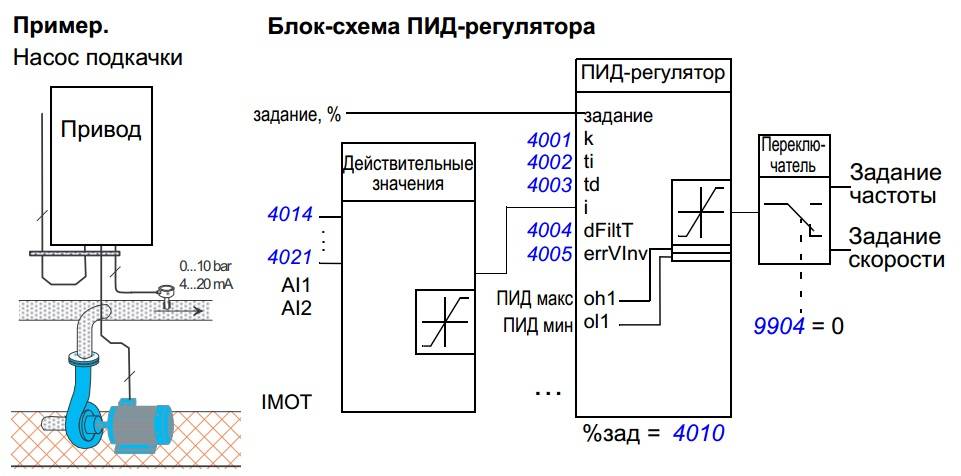
На рис.2 и рис.3 приведены условные блок-схемы систем регулирования давления воды в водоснабжении с использованием преобразователей частоты ABB серии ACS355.
 Коды ошибок частотного преобразователя Vacon
Коды ошибок частотного преобразователя Vacon
Рис.2. Условная блок-схема системы регулирования давления воды в водоснабжении.
Преобразователи частоты ABB серии ACS355
Преобразователи частоты ABB серии ACS355 – оптимальный выбор по соотношению «цена-качество» для решения задач с ПИД-регулированием. Общий вид приводов ACS355 показан на рис.4.
Частотные приводы ACS355 обладают широким набором параметров и возможностей. Настроить необходимый режим работы возможно как с панели управления преобразователем, так и при помощи персонального компьютера, посредством специализированного программного обеспечения DriveWindow Light.


Рис.4. Преобразователи частоты ABB серии ACS355 с базовой панелью управления.
В данной статье, для примера, рассмотрен вариант настройки ПИД-регулятора преобразователя ACS355 при помощи панели управления.
Панель управления к частотному приводу ACS355 предлагается в двух вариантах исполнения: базовая панель и интеллектуальная панель управления (см. рис.5).

 Регулирование давления воды частотным преобразователем
Регулирование давления воды частотным преобразователемРис.5. Варианты панелей управления к преобразователям частоты ABB серии ACS355.
Интеллектуальная панель управления частотным приводом ACS355 имеет встроенный мастер запуска (настройки) и интерактивную справку. С помощью этих инструментов настройку преобразователя частоты ACS355 на режим ПИД-регулирования можно выполнить без особых временных затрат и не пользуясь руководством по эксплуатации.
При использовании базовой панели управления встроенных удобных инструментов, указанных выше, нет.
Настройка ПИД-регулятора в преобразователе ACS355
Для простоты настройки режима ПИД-регулирования в преобразователе частоты ACS355 (с базовой или интеллектуальной панелью управления) ниже изложен минимально необходимый перечень параметров, на которые необходимо обратить внимание (см. таблицу 1).
Таблица 1: Список параметров для настройки режима ПИД-регулирования в преобразователе частоты ACS355
| Номер и название параметра | Описание функции параметра | Значение параметра | Описание выбранного значения параметра |
| Выбор макроса ПИД-регулятор | |||
| 9902 ПРИКЛ. МАКРОС | Выбирает прикладной макрос | 6 (ПИД-РЕГУЛЯТ) | ПИД-регулирование. Для приложений, в которых привод регулирует параметр технологического процесса. |
| Переходим на внешний 2 (ЦВ1 – автоматический режим) | |||
| 1002 КОМАНДЫ ВНЕШН. 2 | Определяет способ подключения и источник команд пуска, останова и направления вращения для внешнего устройства управления 2 (ВНЕШНИЙ2) | 1 (ЦВХ1) | Команды пуска и останова подаются через цифровой вход 1 (0 = останов, 1= пуск). Направление вращения фиксируется в соответствии с параметром 1003 НАПРАВЛЕНИЕ (установка ВПЕРЕД, НАЗАД= ВПЕРЕД) |
| Управление по каналу Внешний 2 (там есть ПИД) | |||
| 1102 ВЫБОР ВНЕШН. 1/2 | Определяет источник, с которого привод считывает сигнал, выбирается одно из двух внешних устройств управления (ВНЕШНИЙ1 или ВНЕШНИЙ2). | 7 (ВНЕШНИЙ2) | Активно внешнее устройство управления 2. Источники управляющих сигналов определяются параметрами 1002 КОМАНДЫ ВНЕШН. 2 и 1106 ИСТОЧН. ЗАДАНИЯ 2. |
| Выход ПИД1 подключаем в работу | |||
| 1106 ИСТОЧН. ЗАДАНИЯ2 | Выбор источника сигнала для внешнего задания 2 (ЗАДАНИЕ2) | 19 (ВЫХ. ПИД1) | Выход регулятора ПИД1 См. группы параметров 40 ПИД РЕГУЛЯТОР1 и 41 ПИД РЕГУЛЯТОР2 |
| Выбор направления вращения | |||
| 1003 НАПРАВЛЕНИЕ | Разрешает управление направлением вращения двигателя или фиксирует направление | 1 (ВПЕРЕД) | Направление вращения – только вперед |
| Разрешение на запуск привода | |||
| 1601 РАЗРЕШЕНИЕ РАБОТЫ | Выбирает источник внешнего сигнала разрешения работы. | 0 (НЕ ВЫБРАН) | Позволяет запуск привода без внешнего сигнала разрешения работы. |
| Запуск без намагничивания постоянным током | |||
| 2101 РЕЖИМ ПУСКА | Выбор способа пуска двигателя | 1 (АВТОМАТ) | Привод запускает двигатель сразу же с нулевой частоты, если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение СКАЛЯР: ЧАСТ. Если требуется пуск на ходу, выберите ПУСК СКАН. Если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение ВЕКТОР: СКОРОСТЬ или ВЕКТОР: МОМЕНТ, перед пуском привод предварительно намагничивает двигатель постоянным током. Время предварительного намагничивания определяется значением параметра 2103 ВРЕМЯ ПОДМАГНИЧ. См. значение НАМАГН.ПТ. |
| Выбор режима останова | |||
| 2102 РЕЖИМ ОСТАНОВА | Выбор режима останова двигателя | 1 (ВЫБЕГ) | Останов двигателя путем отключения питания. Двигатель вращается по инерции до остановки. |
| Выбираем единицы измерения и формат отображения | |||
| 4006 ЕДИНИЦЫ ИЗМЕР | Выбирает единицу измерения для текущих значений (регулируемой величины) ПИД-регулятора. | 4 (%) | процент |
| 22 (бар) | бар | ||
| 40(куб.м/мин) | кубометр в минуту | ||
| 4007 ПОЛОЖ.ДЕС. ТОЧКИ | Определяет положение десятичной точки для регулируемых ПИД регулятором величин. | 1 | |
| 4008 ЗНАЧЕНИЕ 0% | Вместе с параметром 4009 ЗНАЧЕНИЕ 100 % определяет масштабирование регулируемых ПИД регулятором величин. | ||
| 4009 ЗНАЧЕНИЕ 100% | Вместе с параметром 4008 ЗНАЧЕНИЕ 0% определяет масштабирование регулируемых ПИД-регулятором величин. | ||
| Выбор сигнала уставки | |||
| 4010 ВЫБОР УСТАВКИ | Определяет источник сигнала задания для ПИД-регулятора технологического процесса. | 0 (ПАНЕЛЬ УПРАВ) | Панель управления |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. | ||
| 4011 ВНУТР. УСТАВКА | Выбирает фиксированное значение в качестве задания ПИД-регулятора процесса, когда параметр 4010 ВЫБОР УСТАВКИ установлен на ВНУТРЕННИЙ. | 40 | Значение этого пункта необходимо изменять в случае, когда параметр 4011 равен 19 и устанавливать необходимое для технологического процесса значение. |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. | ||
| 1107 МИН. ЗАДАНИЯ2 | Определяет минимальную величину внешнего задания 2 (ЗАДАНИЕ2). Соответствует минимальной установке для используемого источника сигнала. | 0,00% | |
| 1108 МАКС. ЗАДАНИЯ2 | Определяет максимальную величину внешнего задания2 (ЗАДАНИЕ2). Соответствует максимальной установке для используемого источника сигнала. | 100,00% | |
| Выбор сигнала ОС | |||
| 4016 ВХОД СИГН.1 | Определяет источник действительной величины 1 (СИГН.1). См. также параметр 4018 СИГН.1 МИН | 2 (АВХ2) | Используется аналоговый вход АВХ2 для СИГН.1 |
| Инвертирование сигнала ОС | |||
| 4005 ИНВЕРТ. ОШИБКИ | Выбирается зависимость между сигналом обратной связи и скоростью привода. | 0 (НЕТ) | Прямая зависимость: уменьшение сигнала обратной связи приводит к увеличению скорости привода. Ошибка= Задание- Обратная связь |
| Настройки ПИД-регулятора | |||
| 4001 КОЭФ. УСИЛЕНИЯ | Определяет коэффициент усиления ПИД-регулятора технологического процесса. | 1 | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4002 ВРЕМЯ ИНТЕГРИР | Определяет время интегрирования ПИД-регулятора1 технологического процесса. | 10,0с | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4003 ВРЕМЯ ДИФФЕРЕНЦ | Определяет время дифференцирования ПИД-регулятора технологического процесса. | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. | |
| Параметры управления | |||
| 2202 ВРЕМЯ УСКОР. 1 | Определяет время ускорения1 | 5,0 с | |
| 2203 ВРЕМЯ ЗАМЕДЛ. 1 | Определяет время замедления1 | 5,0 с |
Данный базовый набор параметров позволяет запустить преобразователь частоты ABB серии ACS355 в режиме ПИД-регулирования в общем случае. Изучив руководство по эксплуатации, пользователь может выполнить более тонкую настройку, оптимально подходящую для конкретного применения.
Руководство по эксплуатации на русском языке в печатном виде поставляется вместе с преобразователем частоты ACS355 в одной коробке. Также руководство на русском языке можно скачать в электронном варианте здесь.
Блок-схема настройки ПИД-регулятора ПЧ ACS355
Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) преобразователя частоты ABB серии ACS355 показана на рис.6.
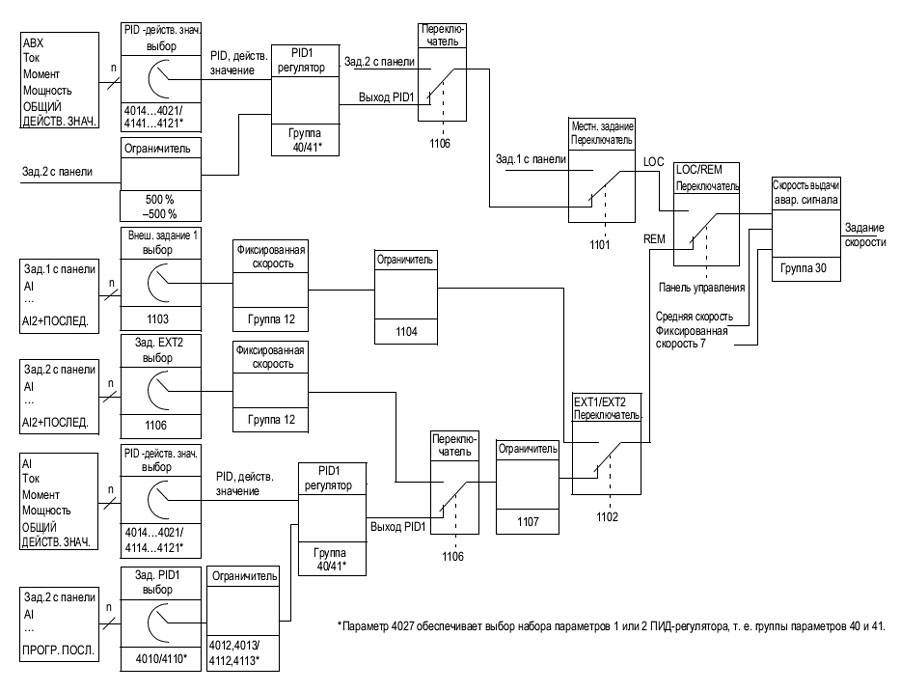
Рис.6. Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) в преобразователях частоты ABB серии ACS355.
На блок-схеме указаны номера параметров и номера групп параметров из руководства по эксплуатации преобразователя частоты.
Выводы
Преобразователи частоты ABB серии ACS355 имеют удобную настройку ПИД-регулятора (мастер запуска) и интерактивную русскоязычную справку. Это позволяет адаптировать преобразователь под широкий спектр задач и быстро ввести привод в эксплуатацию. Возможность настройки преобразователя частоты, как через панель управления, так и при помощи компьютера, добавляет гибкости и удобства в использовании ПЧ ACS355.
предыдущая новость —> архив новостей —> следующая новость →—>
Для простоты общения со столь сложной электроникой все частотные преобразователи оснащены небольшими дисплеями с помощью которых выводятся информационные сообщения с кодами ошибок, расшифровав которые можно сразу же узнать причину ее возникновения. Если учесть распространенность данной промышленной электроники, то появляется острая нужда в расшифровке кодов ошибок частотных преобразователей.
Существует несколько видов ошибок, некоторые из них можно устранить автоматически, а некоторые возможно исправить только, обратившись в специализированный сервисный центр. В таблицах ниже приведены все коды ошибок частотного преобразователя ABB ACS 400 и их расшифровка, то есть причина по которой возникла та или иная ошибка.
Коды ошибок частотника ABB ACS 400 сигнализирующие о неисправности и аварии
Преобразователь частоты ABB ACS 400 генерирует коды состояния неисправности и состояния аварии для внешней системы управления. Доступ к этим кодам возможно получить исключительно по последовательной линии связи (доступа с пульта управления нет).
Коды ошибок частотного преобразователя ABB ACS 400 выводятся на месте группы параметров 3. В этой группе также содержатся копии командного кода и кода состояния. Параметры группы 3 доступны только для чтения; однако оба кода состояний могут быть сброшены путем записи в них нуля.
Коды состояния, неисправности, аварии частотного преобразователя ABB ACS 400
|
Номер |
Наименование |
Описаниесание |
|
301 |
MAIN COMMAND WORD (ГЛАВНОЕ КОМАНДНОЕ СЛОВО) |
Доступная только для чтения копия командного слова.. |
|
302 |
MAIN STATUS WORD (ГЛАВНОЕ СЛОВО СОСТОЯНИЯ) |
Доступная только для чтения копия слова состояния.. |
|
305 |
FAULT WORD 1 (СЛОВО НЕИСПРАВНОСТЕЙ 1) |
Информация о неисправности. При активизиро- ванной неисправности устанавливается значение в соответствующем разряде. Описания разрядов приведены в Таблица 32. |
|
306 |
FAULT WORD 2 (СЛОВО НЕИСПРАВНОСТЕЙ 2) |
Информация о неисправности. При активизиро- ванной неисправности устанавливается значение в соответствующем разряде. Описания разрядов приведены в Таблица 32. |
|
308 |
ALARM WORD 1 (СЛОВО АВАРИЙНЫХ СОСТОЯНИЙ 1) |
Информация об аварийном состоянии. При активизированном аварийном состоянии устанавливается значение в соответствующем разряде. Разряд остается установленным до тех пор, пока не будет сброшено все слово аварийных состояний путем записи в него 0. См. Таблица 33. |
|
309 |
ALARM WORD 2 (СЛОВО АВАРИЙНЫХ СОСТОЯНИЙ 2) |
Информация об аварийном состоянии. При активизированном аварийном состоянии устанавливается значение в соответствующем разряде. Разряд остается установленным до тех пор, пока не будет сброшено все слово аварийных состояний путем записи в него 0. См. Таблица 33. |
Аварийная и предупредительная индикация выводится на 7-сегментный дисплей пульта ACS100-PAN используя систему кодов «ALxx» и «FLxx», где xx код соответствующего предупреждения либо аварии. На цифровой дисплей пульта управления ACS100-PAN вместе с кодами ошибок и предупреждений дополнительно выводятся короткие сообщения.
Предупреждения сопровождаются миганием зеленого светодиода, при выводе кода ошибки частотного преобразователя горит или мигает красный светодиод.
Информационные сообщения и коды ошибок частотного преобразователя ABB ACS 400
Для сброса аварийных кодов ошибок ЧП, сопровождаемых миганием светодиода красного цвета, достаточно на некоторое время отключить питание ЧП. Другие аварийные коды ошибок частотника ABB (при постоянно горящем красным светодиоде) можно сбросить или с пульта управления (последовательный канал связи / цифровой вход), или с помощью временного отключения питания привода. После устранения причины возникновения ошибки и ее сброса можно запустить электродвигатель.
Предупредительные коды частотного преобразователя ABB ACS 400
|
Код |
Сообщение |
Описание |
|
1* |
ОТКАЗ |
Неудачная загрузка/разгрузка параметра. Могут быть несовместимы версии программного обеспечения приводов. Версии программного обеспечения можно определить по параметру 3301 ВЕР СИЯ ПРОГР. |
|
2* |
ПУСК АКТИВИЗИРОВАН |
Работа пульта управления не разрешена при активизированном сигнале пуска. |
|
3* |
МЕСТНОЕ/ДИСТАНЦИОН |
В текущем режиме управления (местном или дистанционном) работа пульта управления не разрешена. Режим управления является местным, если на пульте управления выводится LOC, и дистанционным, если на пульте управления выводится REM. |
|
5* |
БЛОКИРОВ КЛАВИАТУРЫ |
Работа пульта управления запрещена по одной из следующих причин: Клавиша START/STOP заблокирована с цифрового входа. Это может происходить в определенных конфигурациях цифровых входов. См. главу «Макропрограммы». Кнопка REVERSE (Реверс) заблокирована, так как направление вращения вала задано параметром 1003 НАПРАВЛЕНИЕ. Привод работает в режиме дистанционного управления и клавиши START/STOP и REVERSE не действуют. |
|
6* |
МЕСТН БЛОКИР ПАРАМЕТ |
Работа пульта управления не разрешена: Параметр 1602 БЛОКИР ПАРАМ запрещает редактирование параметров Параметр 1605 ЗАПРЕТ МЕСТ УПР запрещает местное управление. |
|
7* |
МАКРОС ЗАВОД УСТ-КИ |
Работа пульта управления запрещена: выбранная макропрограмма «Заводские установки» не допускает никаких изменений. Макропрограмма «Заводские установки» предназначена для применения без пульта управления. |
|
10** |
ПР ЕВЫШЕНИЕ ТОКА |
Активизирован контроллер превышения по току. |
|
11** |
ПР ЕВЫШЕН НАПР ЖЕНИЯ |
Активизирован контроллер превышения по напряжению. |
|
12** |
ПОНИЖЕН U ЗВ ПОС ТОК |
Активизирован контроллер пониженного напряжения. |
|
13 |
ФИКСАЦИЯ НАПРАВЛЕНИЯ |
Направление вращения фиксировано параметром 1003 НАПРАВЛЕНИЕ. |
|
14 |
НЕИСПРАВ КАНАЛ СВЯЗИ |
Отсутствует связь по последовательному каналу. Проверьте соединения между внешней системой управления и преобразователем ACS 400. См. параметры 5003 ПЕРИОД ОШ ОБМЕН и 5004 ОШИБКА ОБМЕНА. |
|
15*,** |
ОШИБКА MODBUS |
По каналу «Стандарт Modbus« передан сигнал исключительной ситуации шины Modbus. Возможно, ведущее устройство шины передает запросы, которые не могут быть обработаны преобразователем ACS 400. См. раздел «Стандартная свясь по последовательному каналу«. Три последних кода исключительных ситуаций хранятся в параметрах 5213-5215. |
|
16 |
НЕТ СИГНАЛА АВХ1 |
Отсутствие аналогового входа 1. Значение аналогового сигнала на входе 1 меньше, чем МИНИМУМ АВХ1 (3022). Обратитесь также к параметру 3001 АВХ СИГНАЛ<mid> |
|
17 |
НЕТ СИГНАЛА АВХ2 |
Отсутствие аналогового входа 2. Значение аналогового сигнала на входе 2 меньше, чем МИНИМУМ АВХ2 (3023). Обратитесь также к параметру 3001 АВХ СИГНАЛ<min> |
|
18 |
ОБРЫВ ПАНЕЛИ УПР-Я |
Отсутствие пульта. Пульт отключен, когда привод работает в режиме местного управления (на дисплей пульта управления выводится LOC), или привод работает в режиме дистанционного управления (REM) и в его конфигурации разрешен прием команд Пуск/Стоп/Направление или опорный сигнал с пульта управления. Обратитесь к параметрам групп 10 ВХОДЫ УПРАВЛЕНИЯ и 11 НАСТРОЙКА ЗАДАНИЯ. См. также параметр 3002 ОБРЫВ ПАНЕЛИ УПР. |
|
19** |
ПЕРЕГРЕВ ПЧ |
Перегрев преобразователя ACS 400. Этот аварийный сигнал выводится, когда температура достигает 95 % предела срабатывания защиты. |
|
20 |
ТЕМПЕРАТУР ЗАЩИТА ДВ |
Перегрев электродвигателя по оценке преобразователя ACS 400. См. Параметры 3004…3008. |
|
21 |
НЕДОГРУЗКА |
Слишком низкая нагрузка электродвигателя. Проверьте исправность управляемого оборудования. См. параметры 3013…3015. |
|
22 |
ОПРОКИДЫВАНИЕ ДВ |
Электродвигатель работает в области опрокидывания. Это может быть вызвано слишком большой нагрузкой или недостаточной мощностью электродвигателя. См. параметры 3009…3012. |
|
23 |
НЕИСПРАВ DDCS |
Обнаружена потеря связи по последовательному каналу DDCS.
См. руководство соответствующего адаптера локальной сети fieldbus. См. «Руководство по дополнительному модулю DDCS» и параметры 5003…5006. |
|
24 |
|
|
|
25 |
|
|
|
26** |
ПЕРЕГРУЗКА ВЫХ ЦЕПИ |
Перегрузка инвертора. Выходной ток преобразователя ACS 400 превышает номинальные значения, указанные на стр. 27 настоящего руководства. |
|
27* |
АПВ |
Преобразователь ACS 400 собирается выполнить операцию автоматического сброса неисправности (автоматического повторного включения). В результате после сброса привод может запуститься. См. группу параметров 31 АВТ ПОВТОР ВКЛЮЧ. |
|
28* |
АКТИВНО ОТКЛ ПИД-РЕГ |
Активна функция отключения ПИД-регулятора. При деактивизации функции отключения ПИД-регулятора возможно ускорение привода. См. параметры 4018 УРОВЕНЬ ОТКЛ, 4013 ВЫДЕРЖКА ОТКЛ Р, 4014 УРОВЕНЬ ОТК РЕГ и 4015 ВЫДЕРЖКА ВКЛ Р. |
|
29* |
АВТ ЧЕРЕДОВАНИЕ |
Активна функция авточередования блока управления насосами и вентиляторами. Подробнее см. группу параметров 81 УПР НАСОСАМИ ВЕНТ и приложение. |
|
30 |
КОНТР СОСТОЯНИЯ |
Активны блокировки (контроль состояния) блока управления насосами и вентиляторами. Преобразователь ACS 400 не может запустить ни один двигатель (при использовании авточередования) или ACS 400 не может запустить двигатель с регулируемой скоростью (если авточередование не используется). |
Коды ошибок частотного преобразователя ABBACS 400
|
Код |
Сообщение |
Описание |
|||
|
1 |
ПР ЕВЫШЕНИЕ ТОКА |
Слишком большой выходной ток.
|
|||
|
2 |
ПР ЕВЫШЕН НАПРЯЖЕНИЯ |
Слишком высокое постоянное напряжение в промежуточной цепи.
|
|||
|
3 |
ПЕРЕГРЕВ ПЧ |
Слишком высокая температура радиатора охлаждения преобразователя частоты ACS 400. Предел срабатывания температурной защиты составляет 95 °С.
|
|||
|
4** |
КОРОТКОЕ ЗАМЫКАНИЕ |
Неисправность по току. Возможны следующие причины:
|
|||
|
5 |
ПЕРЕГРУЗКА ВЫХ ЦЕПИ |
Перегрузка инвертора. Выходной ток преобразователя ACS 400 превышает номинальные значения, указанные на стр. 27 настоящего руководства. |
|||
|
6 |
ПОНИЖЕН U ЗВ ПОС ТОК |
Недостаточное постоянное напряжение в промежуточной цепи.
|
|||
|
7 |
АВХ1 СИГНАЛ < MIN |
Потеря сигнала аналогового входа 1. Значение аналогового сигнала на входе 1 меньше, чем MIN AВХ 1 (3022). Обратитесь также к параметру 3001 АВХ СИГНАЛ<min> | |||
|
8 |
АВХ2 СИГНАЛ < MIN |
Потеря сигнала аналогового входа 2. Значение аналогового сигнала на входе 2 меньше, чем MIN AВХ 2 (3023). Обратитесь также к параметру 3001 АВХ СИГНАЛ<min> |
9 |
ТЕМПЕРАТУР ЗАЩИТА ДВ |
Перегрев электродвигателя по данным ACS 400. Обратитесь к параметрам 3004…3008. |
|
10 |
ОБРЫВ ПАНЕЛИ УПР-Я |
Потеря связи с пультом. Пульт отсоединен, когда с него поступает команда Пуск/Стоп/Направление.
См. также параметр 3002 ОБРЫВ ПАНЕЛИ УПР. |
|||
|
11 |
ПАРАМЕТРИЗАЦИЯ |
Несовместимые значения параметров:
|
|||
|
12 |
ОПРОКИДЫВАНИЕ ДВ |
Опрокидывание электродвигателя. Это может быть вызвано слишком большой нагрузкой или недостаточной мощностью электродвигателя. См. параметры 3009…3012. |
|||
|
13 |
НЕИСПРАВ КАНАЛ СВЯЗИ |
Отсутствие связи по последовательному каналу «Стандарт Modbus».
|
|||
|
14 |
ВНЕШНЯЯ АВАРИЯ |
Наличие сигнала внешней неисправности. Обратитесь к параметру 3003 ВНЕШНЯЯ АВАРИЯ. |
|||
|
15** |
ЗАМЫКАНИЕ НА ЗЕМЛЮ |
Замыкание на землю. Несбалансированная нагрузка входной системы электропитания.
|
|||
|
16** |
ПУЛЬСАЦИЯ U ЗВ П ТОК |
Пульсации напряжения на шине постоянного тока.
|
|||
|
17 |
НЕДОГРУЗКА |
Слишком низкая нагрузка электродвигателя. Проверьте, исправно ли приводимое оборудование. См. параметры 3013…3015. |
|||
|
18 |
|
||||
|
19 |
DDCS LINK |
Неисправность в линии DDCS.
|
|||
|
20** |
АНАЛ ВХ ЗА ПРЕД ДИАП |
Значение аналогового входа за пределами допустимого диапазона. Проверьте уровень аналогового входного сигнала. |
|||
|
21 — 26 ** |
ОШИБКА АППАРАТН |
Аппаратная ошибка. Обратитесь к поставщику. |
|||
|
Мигает весь дисплей (ACS100- PAN) «COMM LOSS»(ACS-PAN) |
Неисправность последовательного канала связи. Плохое соединение между пультом управления и преобразователем ACS 400. |
Сброс ошибок и Ремонт частотников в сервисном центре
Компания «Кернел» производит ремонт промышленной электроники и оборудования с 2002 года. За это время мы накопили колоссальный опыт в том числе опыт в ремонте частотных преобразователей ABB ACS 400. Ремонт подобной промышленной электроники ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
Специалисты нашего сервисного центра уделяют максимальное внимание к качеству исполнения ремонта, программирования и настройке промышленного преобразователя частоты, не зависимо от производителя данного промышленного оборудования. Именно поэтому мы смело даем гарантию на все выполненные работы шесть месяцев.
Ремонт промышленной электроники производится исключительно с использованием оригинальных запасных частей, на компонентном уровне с применением высокотехнологичного оборудования, квалифицированным персоналом с инженерным образованием.
Если на вашем производстве появились проблемы с частотным преобразователем, которые вы не можете решить самостоятельно, мы всегда рады вам помочь. Обращайтесь в сервисный центр «Кернел». Специалисты нашей компании в минимальные сроки проведут глубокую диагностику и последующий ремонт частотного преобразователя. Оставьте заказ на ремонт оборудования используя форму на сайте, либо свяжетесь с нашими менеджерами, сделать это очень просто.
Как с нами связаться
У вас остались вопросы, связанные с ремонтом, программированием и настройкой частотного преобразователя ABB? Задайте их нашим менеджерам. Связаться с ними можно несколькими способами:
- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Либо позвонив по номеру: +7(8482) 79-78-54; +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail.ru
Далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.








 Используемые источники:
Используемые источники:
- http://chistotnik.ru/chastotnik-abb-instrukciya.html
- http://www.overdrive.by/articles/9/332.html
- https://www.remontservo.ru/pages/publications/article-181/oshibki-chastotnogo-preobrazovatelja-abb


 Простой метод настройки ПИД регулятора
Простой метод настройки ПИД регулятора Ошибки частотного преобразователя KEB
Ошибки частотного преобразователя KEB Подключение и настройка цифрового телевидения через антенну
Подключение и настройка цифрового телевидения через антенну Качество сигнала под контролем — собираем усилитель ТВ антенны
Качество сигнала под контролем — собираем усилитель ТВ антенны